
微型納米精密定位平台 是將超精密平台技術微型化的產品,該MT系列微型納米精密定位平台提供了完整6自由度奈米至亞微米級別的高精度對位需求。產品依運動形式分為四個模塊,包括:
- 單軸直線運動模塊、
- 準平垂直升降運動模塊、
- 平面旋轉運動模塊、
- 共樞紐俯仰擺角運動模塊;
各模塊含有多種外型尺寸可供選擇,這些模組可根據具體需求堆疊組合成多軸運動平台,最多可堆疊出完整六軸,本系列亦可接受客製產品的服務,例如使用於超高真空下對應的解決方案。
[去下載檔案…]
用途
- 探針卡探針組裝之超精密自動化設備
- 攝像頭模組主動對位(AA)設備
- 光纖精密組裝對位設備
- 柔性屏精密貼合設備
- 半導體晶圓檢查設備
- 生物醫學檢查設備
等需要在有限空間內實現超精密定位之應用。
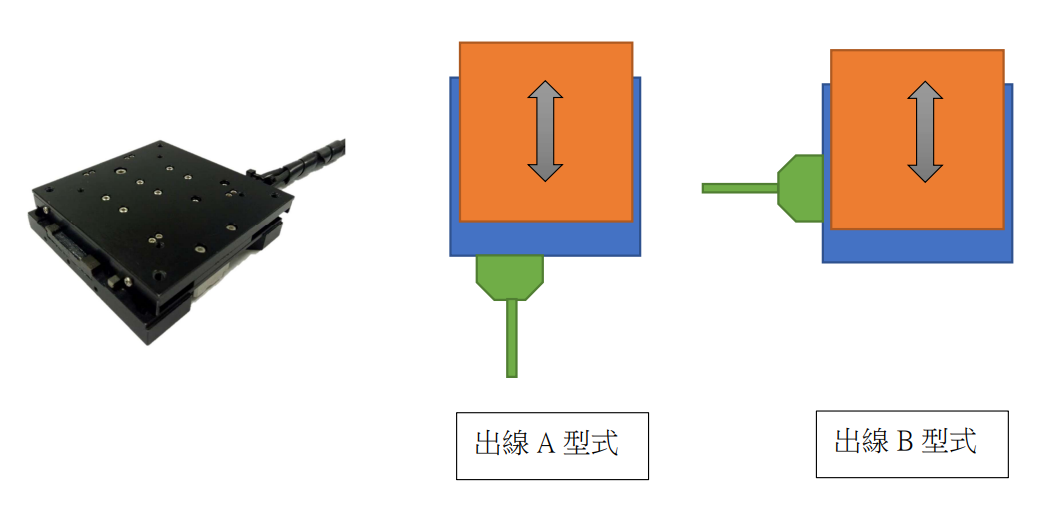
MTSA單軸線性運動軸
- 零頓振線性馬達直接驅動,達成無背隙高速精密運動
- 使用微小型精密級滾珠滑軌,解決交叉滾柱防塵及高速滑珠問題
- 可實現20nm的最小步進運動,全行程重複精度±0.1um
- 全系列使用類比量微型光學尺,可搭配任意解析度數字差分器
- 高性價比的緊湊型設計,與傳統微調對位平臺,安裝孔位相容
-
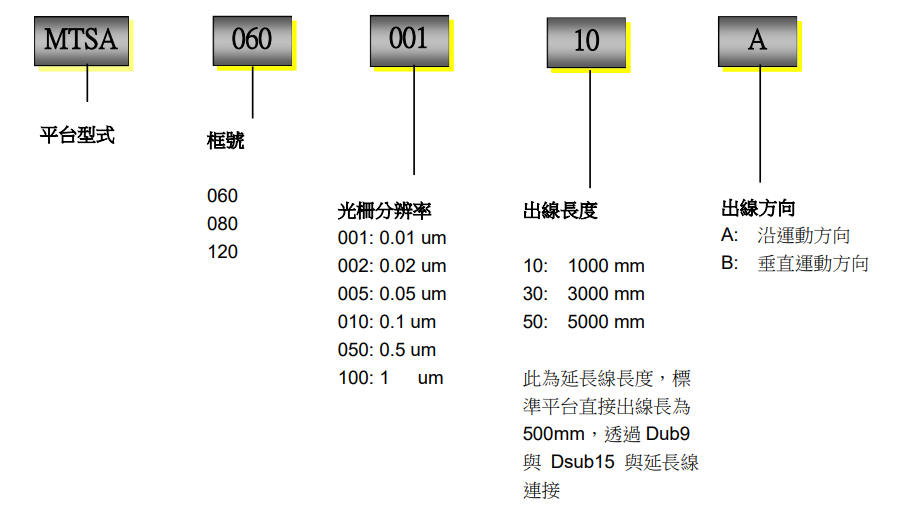
命名規則:
-
規格:
| 機械與性能參數 | 單位 | MTSA060 | MTSA080 | MTSA120 |
| 總行程 | mm | 19 | 19 | 38 |
| 有效行程 | mm | 16 | 16 | 36 |
| 直線度 | um | <1 | <1 | <1 |
| 平面度 | um | <3 | <3 | <3 |
| 重複精度 | um | ±0.1 | ±0.1 | ±0.1 |
| 絕對精度 | um | <0.5 | <0.5 | <0.5 |
| 動子質量 | g | 177 | 190 | 640 |
| 總質量 | g | 275 | 377 | 1000 |
| 電機與驅動參數 | 單位 | MTSA060 | MTSA080 | MTSA120 |
| 峰值推力 | Nt | 8.1 | 16 | 30 |
| 持續推力 | Nt | 2.7 | 4 | 10 |
| 峰值電流 | A | 0.75 | 2 | 3 |
| 持續電流 | A | 0.25 | 0.5 | 1 |
| 推力常數 | Nt/Apeak | 10.8 | 8.1 | 10.8 |
| 反電動勢 | Vpeak(per phase)/m/s | 3.6 | 2.7 | 3.6 |
| 電阻(line-to-line) | ohm | 33 | 11 | 8.2 |
| 電感(line-to-line) | mH | 1.3 | 0.44 | 0.3 |
| 磁對距 | mm | 9.6 | 9.6 | 9.6 |
| 驅動電壓 | V | 24 | 24 | 24 |
-
接腳定義:
-
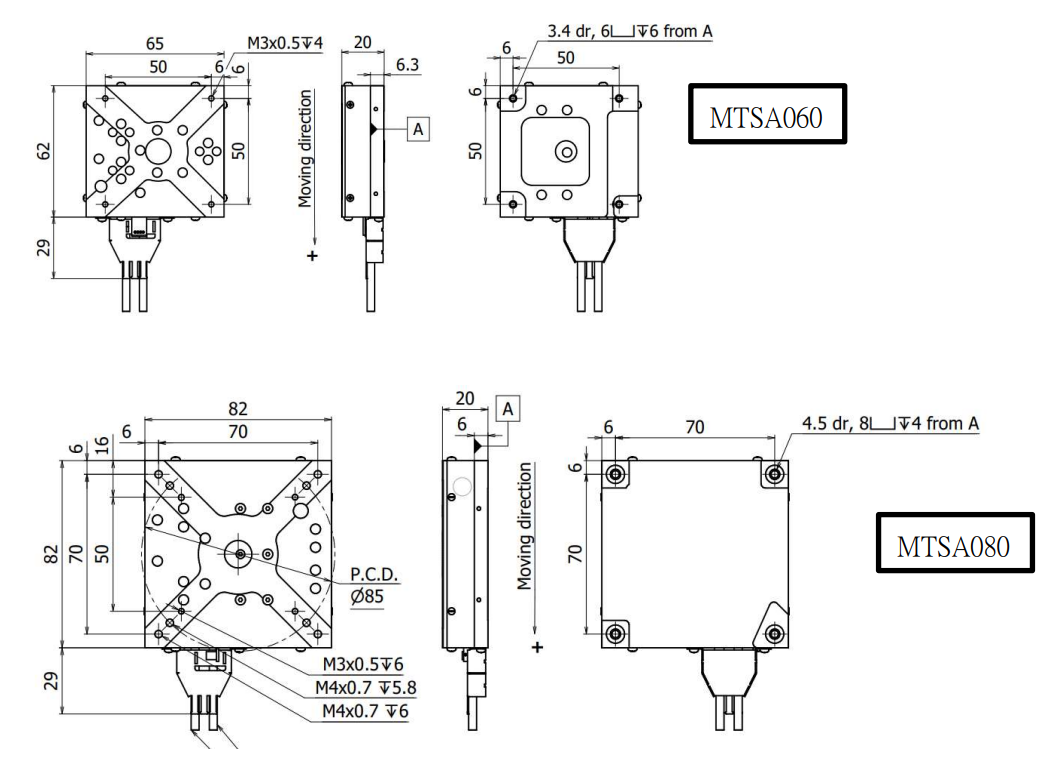
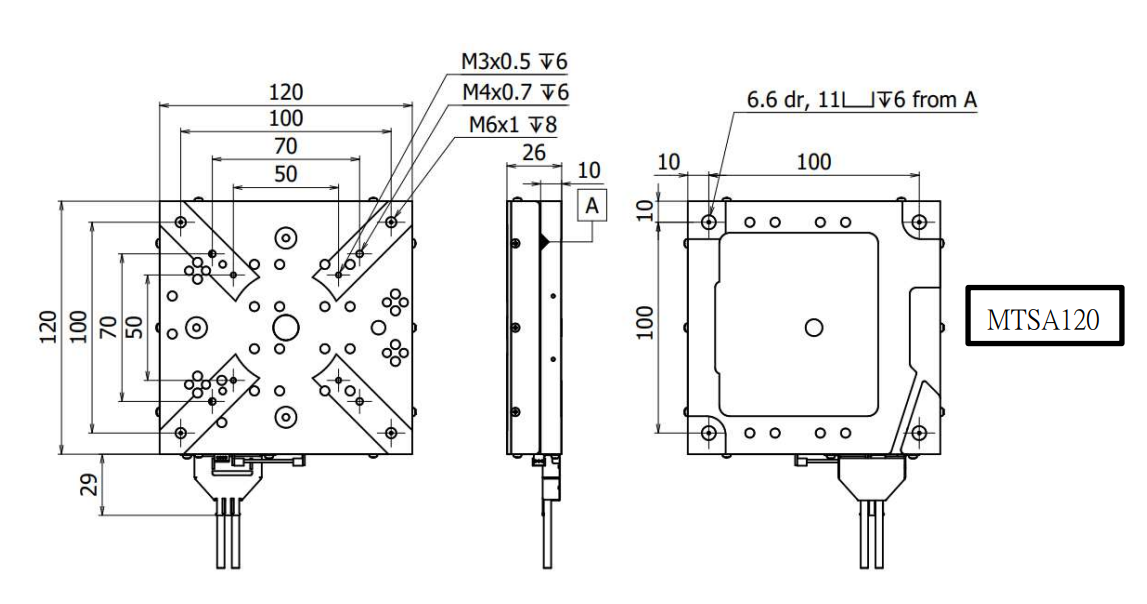
尺寸圖:
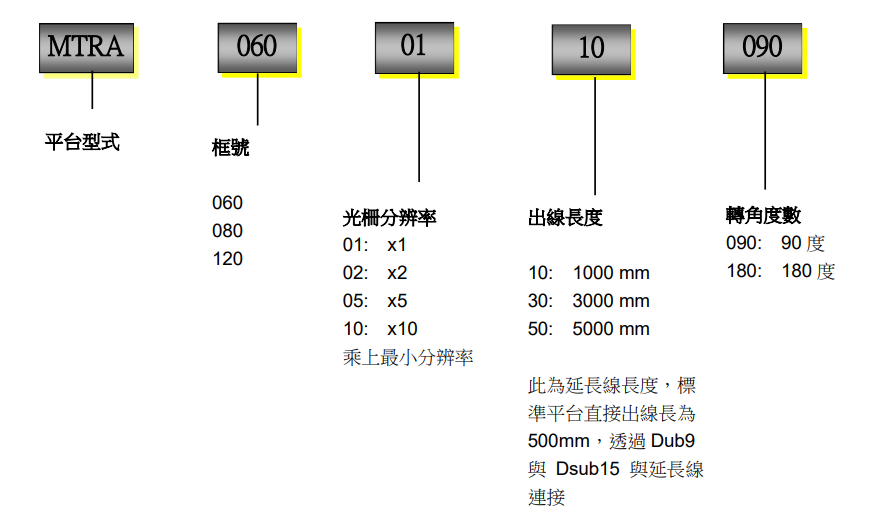
MTRA平面旋轉運動模塊
- 微極距零頓振旋轉馬達直接驅動
- 超薄特殊設計,高剛性,高平面精度
- 有限轉角設計,最大轉角180 度
- 模組具有中空孔,方便光學設計
- 全系列使用微型光學尺,可搭配任意解析度數字差分器

-
命名規則:
-
規格:
| 機械與性能參數 | 單位 | MTRA060 | MTRA080 | MTRA120 |
| 總行程 | 度 | 100/190 | 100/190 | 100/190 |
| 有效行程 | 度 | 90/180 | 90/180 | 90/180 |
| 最小分辨率 | 角秒 | 0.13307 | 0.1006 | 0.0687 |
| 同心偏擺度 | um | ±2 | ±2.5 | ±3.5 |
| 平面偏擺度 | um | ±3 | ±3.5 | ±4.5 |
| 重複精度 | arcsec | ±0.3 | ±0.3 | ±0.3 |
| 絕對精度 | arcsec | <±2.5 | <±2 | <±2 |
| 轉子慣量 | Kg-mm^2 | 49 | 181 | 850 |
| 總質量 | g | 250 | 433 | 920 |
| 電機與驅動參數 | 單位 | MTRA060 | MTRA080 | MTRA120 |
| 峰值扭力 | Nt-m | 0.45 | 0.78 | 1.71 |
| 持續扭力 | Nt | 0.15 | 0.26 | 0.57 |
| 峰值電流 | A | 1.5 | 1.5 | 1.5 |
| 持續電流 | A | 0.5 | 0.5 | 0.5 |
| 扭力常數 | Nt-m/Apeak | 0.3 | 0.52 | 10.8 |
| 反電動勢 | Vpeak(per phase)/rad/s | 0.1 | 2.7 | 3.6 |
| 電阻(line-to-line) | ohm | 7.1 | 9.4 | 14 |
| 電感(line-to-line) | mH | 2.3 | 5.8 | 13 |
| 磁極對 | 12 | 16 | 24 | |
| 驅動電壓 | V | 24 | 24 | 24 |
-
接腳定義:
-
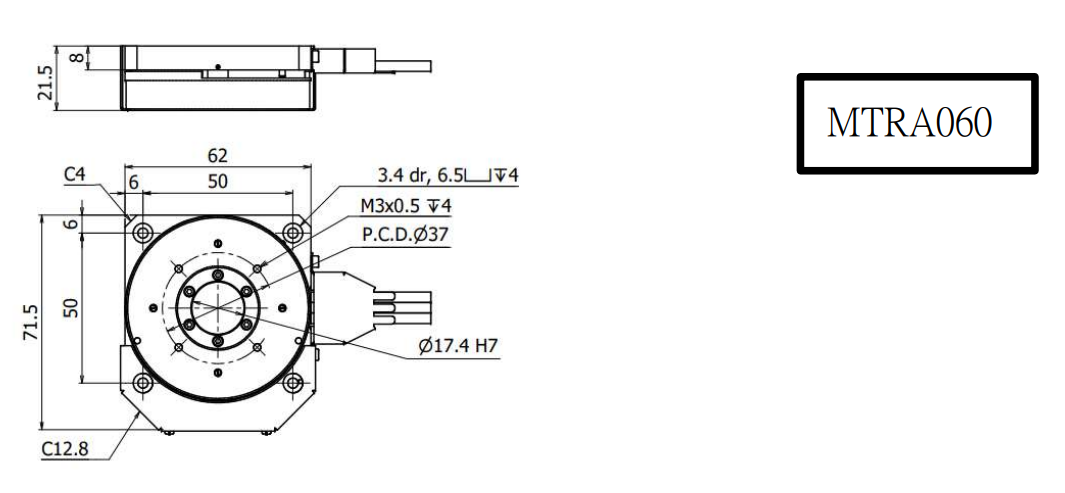
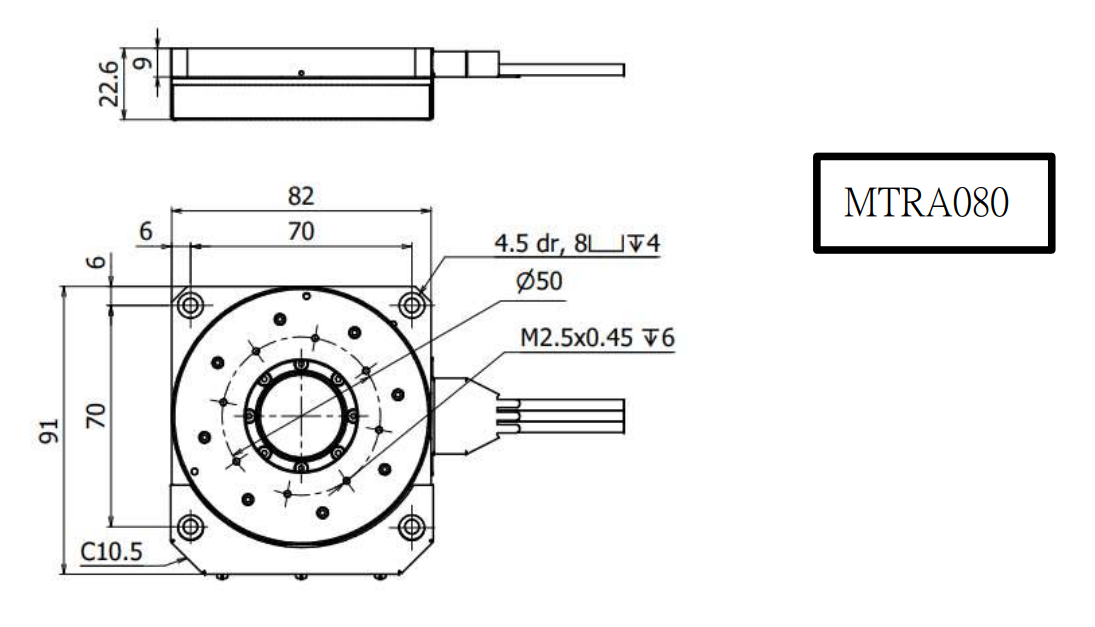
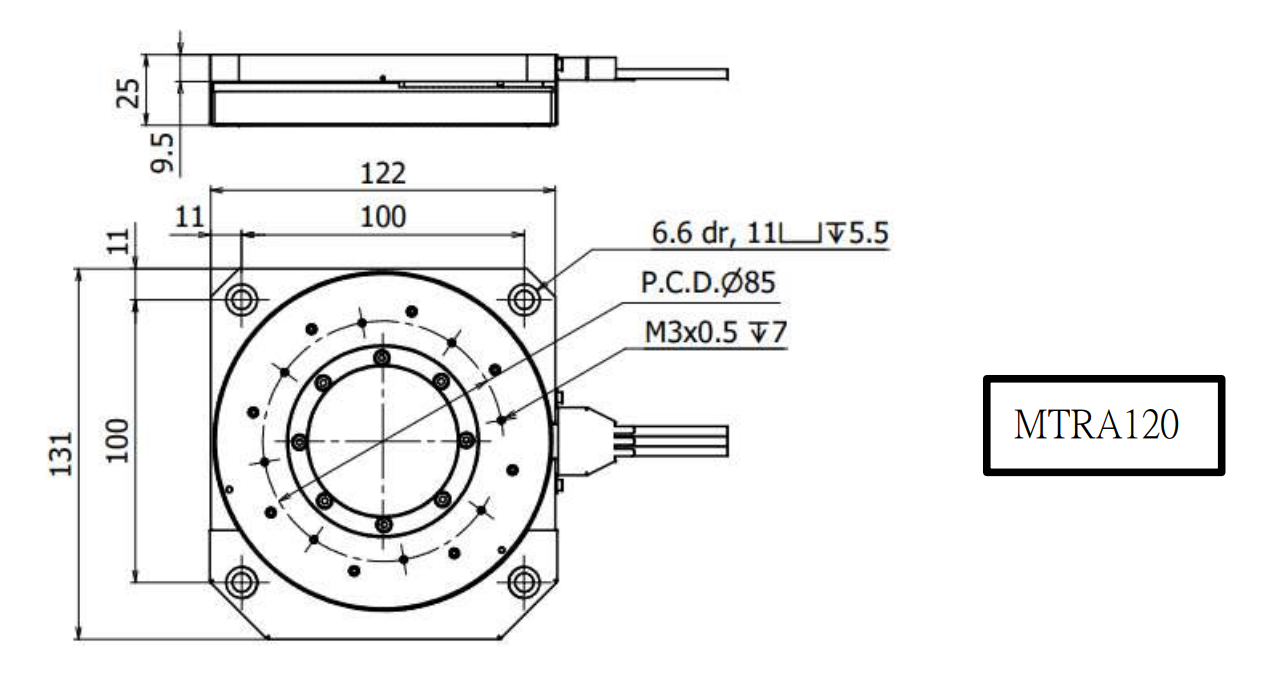
尺寸圖:
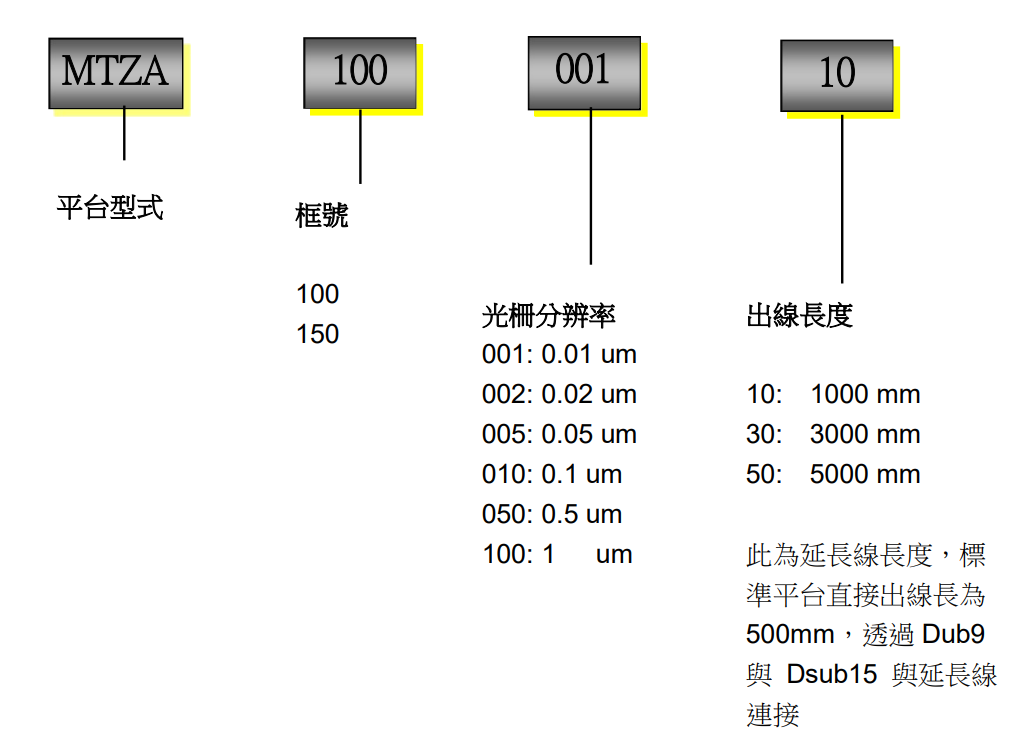
MTZA準平垂直升降運動模塊
- 使用準平舉升倍力結構,負載不偏心,重心姿態衡定
- 零頓振線性馬達直接驅動,達成無背隙高速精密運動
- 可實現20nm的最小步進運動,全行程重複精度±1um
- 大推力設計可承受重負載,通常使用於最底層軸
- 全系列使用微型光學尺,可搭配任意分辨率數字差分器

-
命名規則:
-
規格:
| 機械與性能參數 | 單位 | MTZA100 | MTZA150 |
| 總行程 | mm | 4 | 8 |
| 有效行程 | mm | 3 | 7 |
| 直線度 | um | <1 | <1 |
| 平面度 | um | <3 | <3 |
| 重複精度 | um | ±0.1 | ±0.1 |
| 絕對精度 | um | <0.5 | <0.5 |
| 動子質量 | g | 320 | 646 |
| 總質量 | g | 958 | 2500 |
| 電機與驅動參數 | 單位 | MTZA100 | MTZA150 |
| 峰值推力 | Nt | 160 | 288 |
| 持續推力 | Nt | 40 | 72 |
| 峰值電流 | A | 4 | 8 |
| 持續電流 | A | 1 | 2 |
| 推力常數 | Nt/Apeak | 40 | 33.7 |
| 反電動勢 | Vpeak(per phase)/m/s | 13.3 | 11.2 |
| 電阻(line-to-line) | ohm | 5.5 | 2.75 |
| 電感(line-to-line) | mH | 0.22 | 0.11 |
| 磁對距 | Mm | 1.6 | 1.6 |
| 驅動電壓 | V | 24 | 24 |
-
接腳定義:
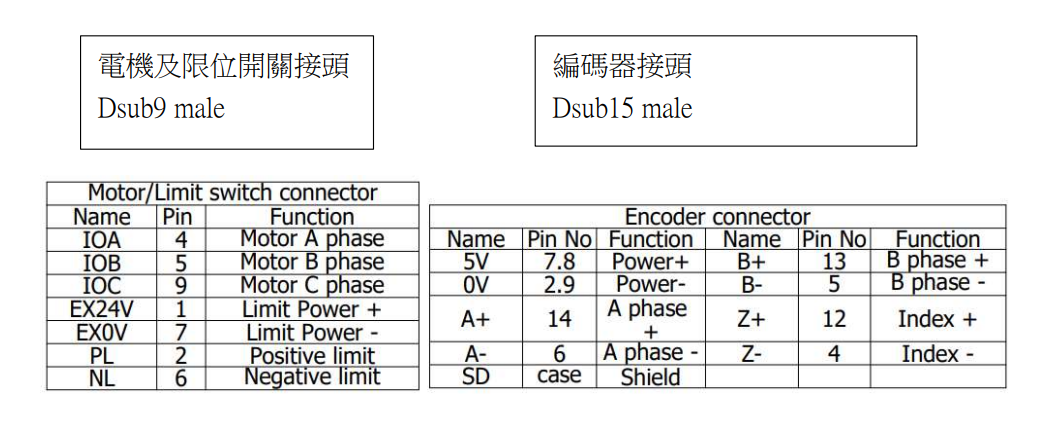
-
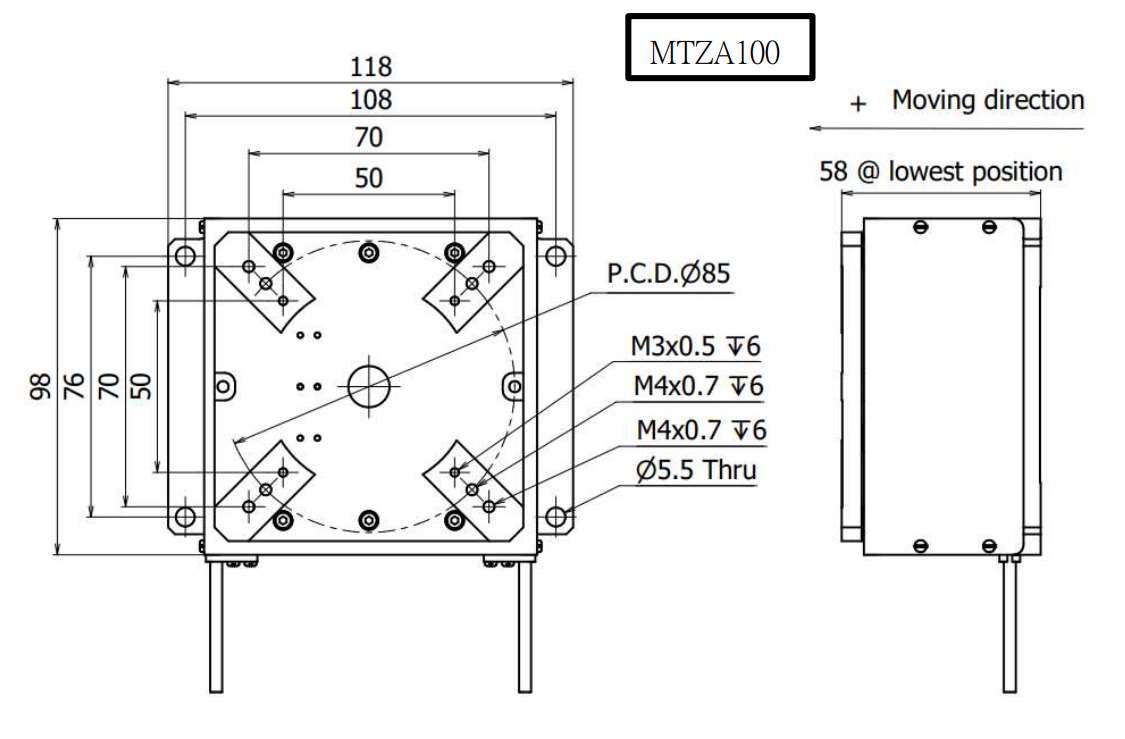
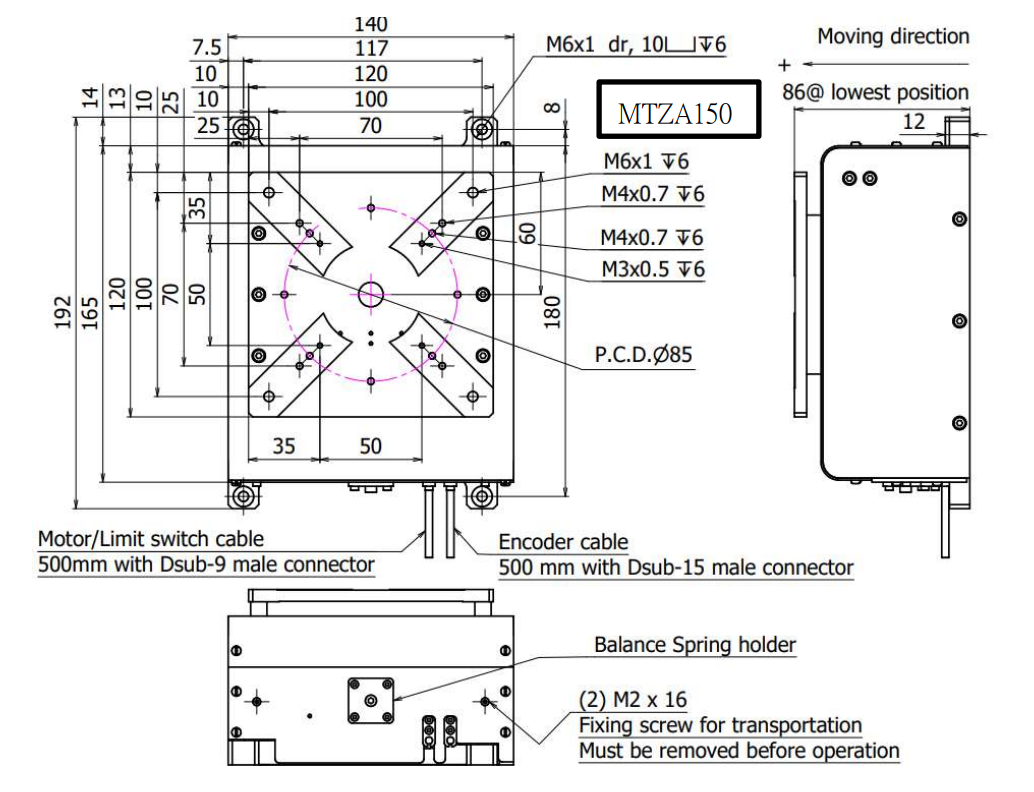
尺寸圖:
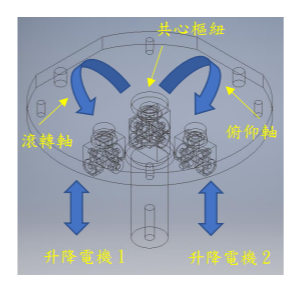
MTPR共樞紐俯仰擺角運動模塊
- 共面擺角結構,使俯仰兩軸的旋轉中心自然同心,簡化對位校正程序
- 零頓震線性馬達直接驅動,達成無背隙高速精密運動
- 有效擺角+/-5度,分辨率可達1 arcsec
- 使用舉升倍力結構,負載不偏心,可承受重負載
- 全系列使用微型光學尺,可搭配任意分辨率數字差分器
-
命名規則:
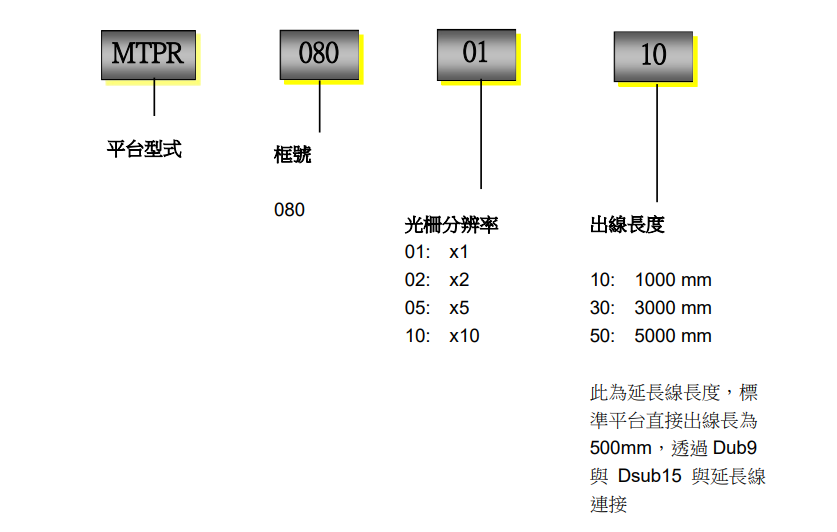
-
規格:
| 機械與性能參數 | 單位 | MTPR080 |
| Pitch/Roll行程 | 度 | ±7 |
| Pitch/Roll有效行程 | 度 | ±5 |
| 分辨率 | 角秒 | 0.0987 |
| 重複精度 | arcsec | ±0.3 |
| 絕對精度 | arcsec | <±2.5 |
| 轉子慣量 | Kg-mm^2 | 26 |
| 總質量 | g | 640 |
| 電機與驅動參數 | 單位 | MTPR080 |
| 峰值扭力 | Nt-m | 0.52 |
| 持續扭力 | Nt | 0.13 |
| 峰值電流 | A | 2 |
| 持續電流 | A | 0.5 |
| 扭力常數 | Nt-m/Apeak | 0.26 |
| 反電動勢 | Vpeak(per phase)/rad/s | 0.08 |
| 電阻(line-to-line) | ohm | 33 |
| 電感(line-to-line) | mH | 1.3 |
| 磁極距 | mm | 9.6 |
| 驅動電壓 | V | 24 |
-
接腳定義:
-
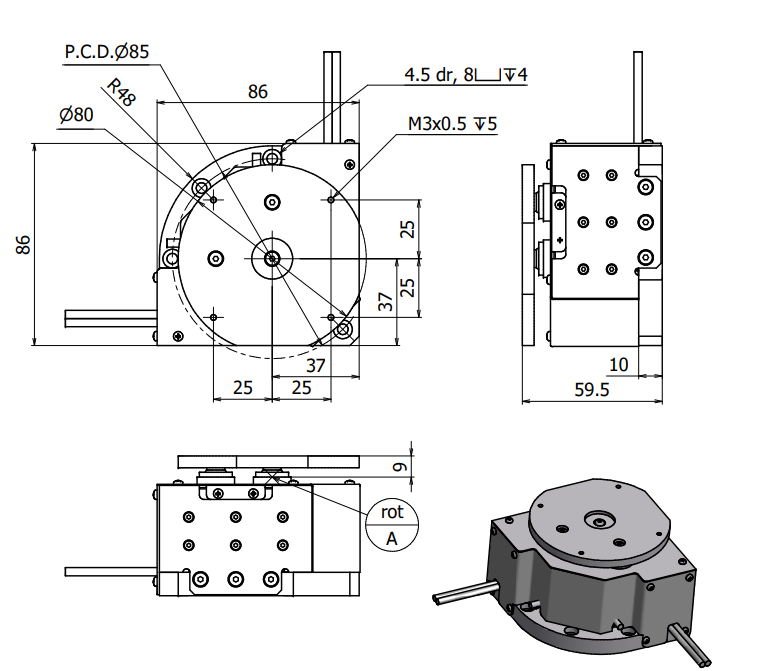
尺寸圖:
資料下載
[返回頁首…]
| 資料名 | 檔案名 | 備註 |
| 微型納米6軸定位平台電子型錄 | 微型納米6軸定位平.pdf | |
| MTSA 系列組合圖 | MTSA.rar | 3D |
| MTRA 系列組合圖 | MTRA.rar | 3D |
| MTZA 系列組合圖 | MTZA.rar | 3D |
| MTPR080 系列組合圖 | MTPR080.rar | 3D |