")
Here, we give you basic concepts of how linear motor works and what the “end effect” is. Second, we compare the linear motor stage with ball screw stage. Third, we point out the features of various types of linear motors. Finally, several important issues on designing a linear motor stage are described.
- Linear motor vs. Rotary motor
- Schematic diagram:
- Schematic diagram:
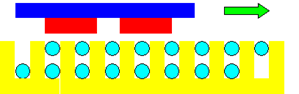
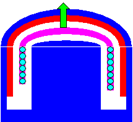
The operation principle of the linear motor and the rotary motor are almost the same. A linear motor can be realized by cutting a rotary motor to the center of the shaft and flat it off as shown in the following figure.
So, there is always a counterpart for linear motor as compared to the rotary motor. For example, we have an induction rotary motor, then a linear induction motor will exist. Similarly, the brushless rotary motor has a counterpart of the brushless linear motor. Here, we do not want to explain the detailed operation principle of various kinds of motors, which can be found in many text books, instead, we point out the main difference between linear and rotary motors — the end effect, a considerable side effect.
- End effect:
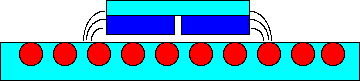
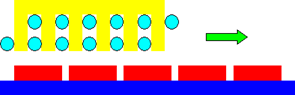
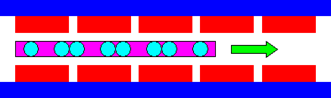
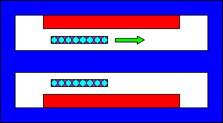
The most different feature between a rotary and a linear motor is the end effect. In the following figure, you can see that there is no end along the rotated direction in a rotary motor. However, obviously, a linear motor mover has two ends along the moving direction.
Such a end will produce complicated phenomena including the considerable cogging force due to reluctance variation, the deformation of magnetic field at high speed…etc. As a consequence, the design of the linear motor and the control algorithm of the motor drive should take this into account to suppress these side effects, especially when accurate and fast positioning is concerned.
- Linear motor stage vs. Ball screw stage
- The following table list the comparison of the linear motor stage and the ball screw stage.
Linear motor stage | Ball screw stage | |
Advantage | Easy to operate at high speed and high acceleration Less maintenance even at high speed and high acceleration operations Easy to achieve fast and accurate positioning because of direct drive Higher dynamic stiffness and servo bandwidth Stroke is no limit | Thrust is larger under a given limitation of stage size Price is lower because of mass production |
Weakness | Thrust is lower under a given limitation of stage size Price is higher Application is difficult (?) | Speed and acceleration are limited Frequent maintenance is necessary if operated at high speed and acceleration because of wearing Backlash lowers the dynamic stiffness and complicates the positioning control Stroke is limited |
What we’d like to say here is the linear motor stage, although, has higher price currently because it has not been mass production yet. However, considering the excellent performance that upgrades your machine and the low maintenance that cuts your long-term cost, it is worthy to employ linear motor stages in your machine as soon as possible. As to the application, we think the most suitable machine to work with linear motor is the one with the demands of high speed, high accuracy, and low external payload, such as pick and place applications.
- Linear motor classifications and features
Linear motors employed in the precision servo control applications mainly contain the following three types…
- Brushless AC servo motor:
This type of motor consists of two parts. One is the assembly of plural magnets arranged in a alternative polarity on a back iron to produce the main magnetic field. The other is the combination of 3-phase coils wound on a steel lamination (iron-core) or fixed by resin/epoxy (epoxy-core) to carry the AC currents for producing thrust. Either part can be the mover, whereas the other the stator. If the magnet assembly is mover, we call it as “moving magnet” scheme, otherwise, “moving winding” scheme
Iron-core moving-winding
Iron-core moving magnet
Ironless/Epoxy-core
- Voice coil motor:
This type of motor is widely used in the motion of reader head of hard disk. The stator consists of magnets and back irons to build a closed magnetic flux loop. The mover, containing one coil to carry DC current, is arranged in the air gap of the magnetic flux loop to produce thrust. There are mainly two configurations, namely, round tube type and rectangular block type.
Rectangular Block type VCM
Round tube type VCM
- Stepping motor:
The stator is composed of slotted steel lamination. The mover consists of multi-phase coils wound on the grooved teeth of the other steel lamination. Due to the reluctance variation of the slot-tooth combination, periodic stable points can be deduced. The current carried in the coil is used to change from one stable point to another, thus achieves movement. Of course, if the current is controlled linearly, finer positioning can be achieved (i.e., micro-stepping motor)
The following table list the features of various types of linear motors.
Advantages | Weakness | Application | |
Brushless, iron-core type, moving magnet | High thrust density High thrust to moving mass ratio No moving cables | Cogging force Force ripple | High speed & high accuracy pick and place. |
Brushless, iron-core type, moving winding | High thrust density | Cogging force Force ripple Low thrust to moving mass ratio With moving cables | Extra long stroke |
Brushless, coreless/epoxy-core | No cogging force | Force ripple Low thrust density Low coil inductance With moving cables | High precision contour tracking |
Voice coil | Simple structure and DC current control resulted in low cost High thrust to moving mass ratio No cogging force No force ripple | Low thrust density With moving cable Stroke is very limited | Vertical use Precision force control Resolution of nm degree |
Stepping | Feedback encoder is not necessary resulted in low cost Driver is relatively simple | Air gap is very small Accuracy depends on machining and may loss steps Long and uncontrolled settling time Thrust rapidly decrease as speed increase. | Medium speed and medium accuracy |
- Important issues on designing a good linear motor system
- Cogging force
Due to the end effect and slot-teeth alignment, the brushless iron-core linear motor has considerable cogging force. Such a force must be minimized to under 2% of rated thrust so that the short settling time of positioning and smoothness of velocity profile can be achieved. The ways to reduce cogging force include skewing the magnet with respect to winding core, using large least common divider of pole and slot number, employing field compensation technique in drive control algorithm. As a consequence, a good linear motor for fast and precision positioning must have low cogging force. You can use hand to move the slide table to feel the extent of cogging force. A good design should lead to a smooth feeling.
- Force ripple
This term is different from the above cogging force, but it has the similar outlook as compared to the cogging force. This force is mainly due to the commutation of 3 phase motor current and the non-perfect sine distribution of the magnetic field. It will affect the fast positioning capability and the low-speed performance. Note that the epoxy-core linear motor also has this drawback even without cogging force. This term only can be measured by the special test facility. The maker should perform this test to verify the quality of the motion stage.
- Ratio of thrust to moving mass
The ratio of thrust to moving mass determines the load capacity of a linear motor. Less moving mass means more capacity for external load. In addition, the reaction force due to moving mass under high acceleration and deceleration will results in considerable vibration to your machine and may lead to unpredictable resonance. So, a good linear motor stage must keep its moving mass as small as possible.
- Decoupled mechanism
In some circumstance, we need to move 2 axes simultaneously. Most of product just mount one axis on the other axis, which leads to unequal bandwidth of motion. For example, if X axis is mounted on the Y axis, the motor of X axis only need to move the moving part of itself, but the motor of Y axis not only move the moving part of itself but the whole X axis stage. Such a scheme is called “stacked type” XY stage. In contrast, the equal bandwidth of motion can be achieved by employing decoupled mechanism. The motor of each axis only need to move the moving part of itself plus a light weight of common slide.
- Duty cycle
The value of duty cycle is very important in determining an adequate rated power for a linear motor. In most cases, you will not run the linear motor all the time, instead, the linear motor will stop moving for a period of time and wait for other activities such as vision calibration or the movement of other axes. Note that the size of the linear motor is related directly to its rated power not maximal power. So, you need to determine the duty cycle or specify the motion profile carefully for your application, otherwise, the linear motor will be over sized or over heated.
- Moving cables
The moving cable is the critical issue on the life cycle of a linear motor stage in addition to the linear guide for suspension. A good linear motor stage must make its number of moving cables as few as possible. In the case that stroke is smaller than the length of moving parts, we can eliminate all the moving cables by employing moving magnet scheme and stationary encoder head. This is important when the stage is operated frequently under high acceleration and deceleration.
The definitions of the specifications for a linear motor stage are illustrated. There are three parts of definitions of specifications you need to figure out, namely, the definitions of the stage specifications, the definitions of the linear-motor specifications, and the definition of dynamic positioning.
A clear understanding of specification definitions is the most fundamental requirement to select a suitable linear motor stage for your machine. Too severe specification requirement leads to unnecessary high cost, while too loose one results in the failure of your project. Hence, it is worthy to spend a little bit of time to read thru whole the material before you go further ahead.
There are three parts of definitions of specifications you need to figure out, namely, the definitions of the stage specifications, the definitions of the linear-motor specifications, and the definition of dynamic positioning.
- Definitions of the stage specifications
- Effective stroke
This term means the distance available for effective positioning. It should exclude the length for over-travel limit switch at the two ends of motion stage. - Resolution
This term means the minimal step that the stage can achieve positioning. For a well tuned and designed linear motor stage, the motion resolution is supposed to be the same as the resolution of the linear scale/feedback encoder. However, these two terms are not actually equivalent. For example, there is one stage equipped with a linear scale of 0.1 um resolution. If you send a step command of 0.1 um, the stage may not move. It starts to move until the command becomes 0.5 um. Then, the resolution of the stage is 0.5 um rather than 0.1 um. - External payload
This term means the mass of all the additional components mounted on the moving slide of the motion stage. - Moving mass
This term means the intrinsic moving mass of the stage itself. It should exclude the external payload. This specification should be provided by the stage maker. - Accuracy, Repeatability, and lost motion
These three specifications are eventually the “static” performance of the motion stage. They have close relationship with the precision grade of the stage components. For example, the accuracy is the synergy effect of the machining precision of the stage mechanical components, the flatness and straightness of the linear guide, and the intrinsic accuracy of the linear scale. The repeatability is mainly related to the resolution of the linear scale, the stiffness of the linear guide, and the rigidity of the stage mechanical components. The lost motion for the linear motor stage should be smaller than the resolution of linear scale, because of direct drive without backlash.What we would like to mention here is that higher requirements of these three specifications will lead to higher price of the motion stage. Hence, it is important to carefully determine these specifications of the motion stage for your application so that the best performance can be achieved with lowest cost.
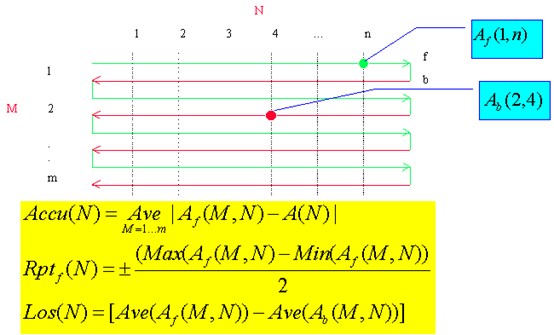
The test method of these three specifications mainly uses the laser interferometer, as shown in the following figure. With the motion stage fixed on a granite table, the moving slide is moved back and forth for m times by the motor drive to position at n predetermined points. Record the actual readings at the predetermined position.
- Effective stroke
The detailed mathematical expressions of accuracy, repeatability, and lost motion at the predetermined point are illustrated as follows.
For the user of the motion stage, it should be noted that the repeatability is the most critical specification for your application. It has direct effect on the quality of your final product. So, finer repeatability should be selected if the price is still allowable. However, the accuracy is more or less tricky. The final accuracy of the motion stage can be compensated according to the results of the accuracy test (error mapping). In addition, if the modern vision calibration system is employed in your machine, the requirement of accuracy can be looser to lower the price.
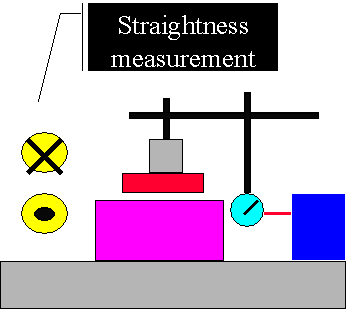
- Straightness and Flatness
Straightness is defined as the maximal horizontal deviation of slide motion within a stroke length. This term can be measured by using a dial gauge with respect to the vertical reference plane parallel to the moving direction. This specification also can be measured by laser interferometer with special lens.
Flatness is defined as the maximal vertical deviation of slide motion within a stroke length. This term can be measured by using a dial gauge with respect to the horizontal reference plane parallel to the moving direction. This specification also can be measured by laser interferometer with special lens.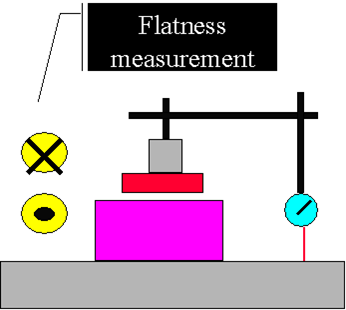
- Definitions of the dynamic positioning specifications
- Maximal velocity, maximal acceleration
This two terms are deduced by investigating the whole motion profile. What we would like to mention here is that the requirement of moving a given stroke within a predetermined period has infinite combination of maximal velocity and maximal acceleration, as shown in the following figure. In addition, the maximal velocity of the stage is constrained by maximal output frequency of encoder, the linear motor itself, and the speed limit of the linear guide. A higher maximal acceleration always means a larger linear motor and drive power. Hence, a reasonable tradeoff between the maximal velocity and maximal acceleration should be made to result in a achievable maximal speed with smallest motor thrust requirement.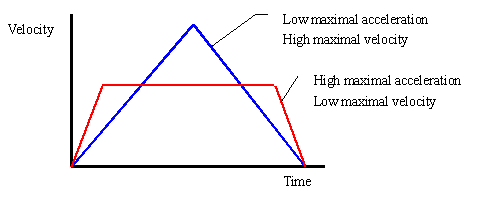
- Maximal velocity, maximal acceleration
- In-position specification
This specification is defined as achieving a given stroke positioning within the specific tolerance in a predetermined period. For example, the in-position specification of wire bonder XY table is moving 2 mm stroke length and positioned within plus/minus 3 um in 18 ms, as shown in the following figure. When the stage maker is also in charge of the drive gain tuning with respect to a dummy external payload, this specification should be clearly defined.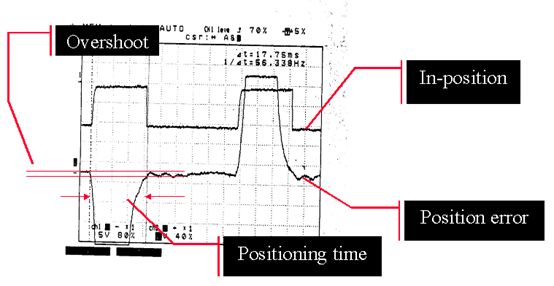
- Definitions of the linear motor specifications
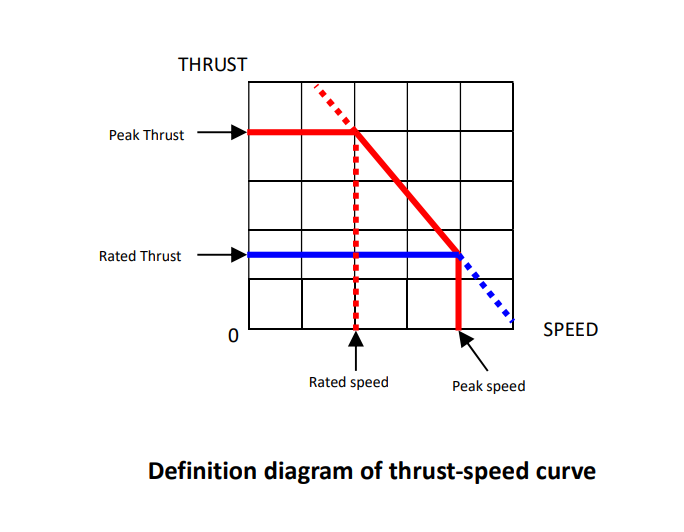
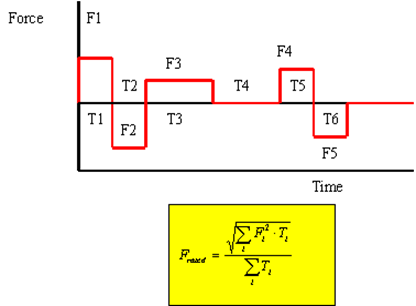
- Rated thrust
This term is also referred as “Continuous force”, which means the motor will produce this force without over-heating the motor winding. A clearer definition of this term should include the temperature rise when continuous power is output. The value of this specification for an application should be derived according to the motion profile. The following diagram illustrates how to calculate this value.
- Rated thrust
- Maximal thrust
This term is also referred as “Maximal force”, which is needed for the motor to achieve maximal acceleration with both moving mass and external payload. A clearer definition of this term should include the allowable period (e.g., 0.5 sec) for maximal force. - Rated current
This term is defined as the line r.m.s. current needed for producing rated force. - Maximal current
This term is defined as the line r.m.s. current needed for producing maximal force. - Force constant
This term is defined as the force produced per line r.m.s. current. - Voltage constant (Back emf)
This term is defined as the peak line-line voltage that motor produced at the speed of 1 m/sec. - Coil resistance
This term is defined as the resistance measured between any two motor lines. - Coil inductance
This term is defined as the inductance measured between any two motor lines
After understanding the specification of the linear motor, the next step is to select the adequate linear motor for a given application. The detailed formula for calculation will be explained.
- Application input
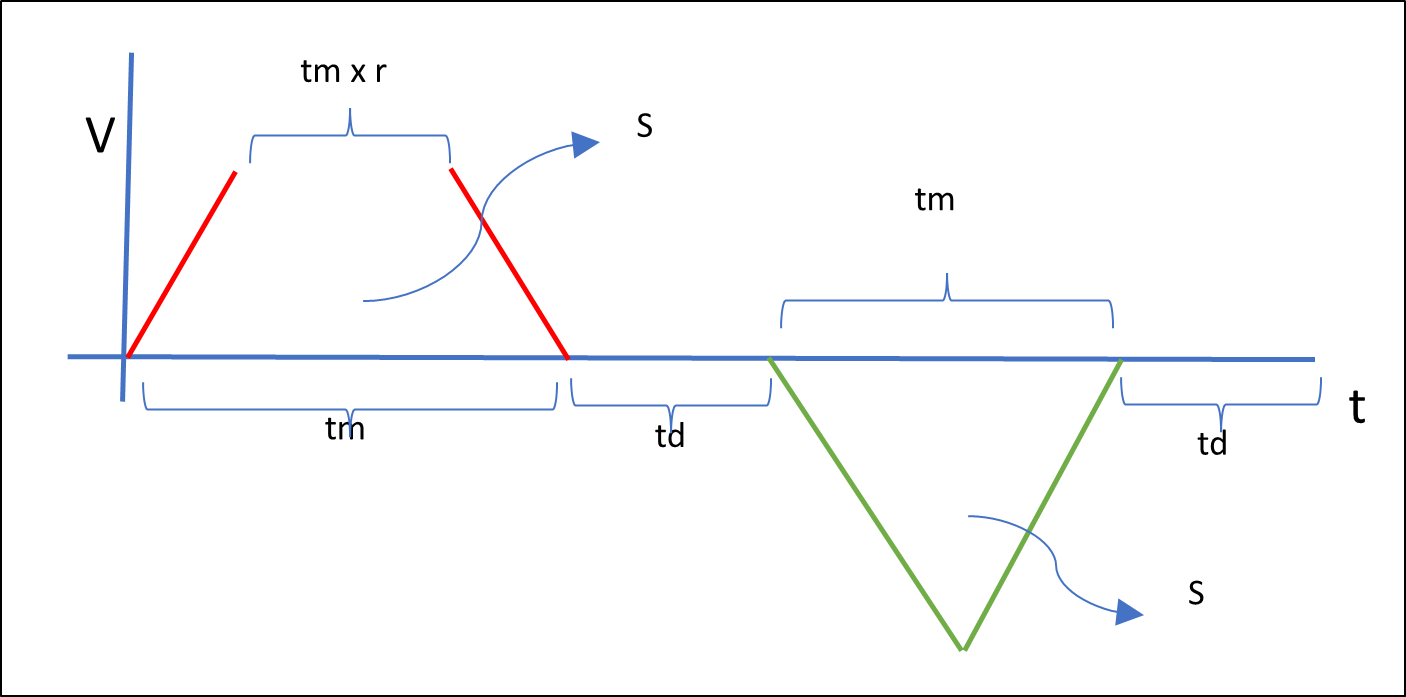
The linear motor of every machine is determined according to the motion profile as shown in the figure below, in which the vertical axis is speed and the horizontal axis is time. The red curve (trapezoid one) represents moving from point A to point B within tm second in which tm x r second is constant speed. The td is the dwell period. The green curve (triangle one) represents moving from point B to point B within tm second in which no constant speed exists (r=0). The distance from A to B is S. Hence, any step of motion should include the following 4 parameters.
Moving stroke: S (m)
Period of movement : tm (sec)
Constant speed ratio : r
Dwell time: td (sec)
Moving mass: M (kg)
- Calculation output
The red curve (trapezoid one)
Max. acceleration: a1_max=4*S/(tm^2*(1-r^2))
Max. speed: V1max=a1_max*tm*(1-r)/2
Be sure that the maximal force: F1max= M*a1_max
must occurred at maximal speed V1max
The green curve (triangle one) (r=0)
Max. acceleration: a2_max=4*S/(tm^2)
Max. speed: V2max=a2_max*tm/2
Be sure that the maximal force: F2max= M*a2_max
occurred at maximal speed V2max.
The continuous force is given by
Fconti = M*sqrt{(a1_max^2*tm*(1-r)+a2_max^2*tm)/(2*tm+2*td)}
With respect to the calculated maximal force
Maximal force: max(F1max, F2max)
An adequate motor can be selected from the motor parametric table.
Note that you should check whether the operating points (V1max, F1max) and (V2max, F2max) are located within the area enclosed by the red solid line as shown below. If not, a new motor with higher maximal force or continuous force should be select so that operating points (V1max, F1max) and (V2max, F2max) are located within the area enclosed by the red solid line.