
Miniature positioning stage of nano precision provides the complete solution of 6 DOF accurate motion. This series include 4 modules as follows:
- Single axis linear motion stage
- Wedge lift vertical motion stage
- Rotational motion stage
- Common pivot center Pitch-Roll motion stage
Each module has various size for selection. They can be stacked together to form at most 6 degree of freedom motion stage. We also provide tailor made service, for example, modifying the stages for high vacuum application.
[Go to download…]
Applications
-
- Pin insertion for Probe card assembly
- Active alignment (AA) equipment for camera module assembly
- Optical fiber alignment equipment
- Flexible panel bonding equipment
- Inspection equipment for semiconductor
- Biological inspection equipment
And other applications need high accuracy positioning but with very limit space.
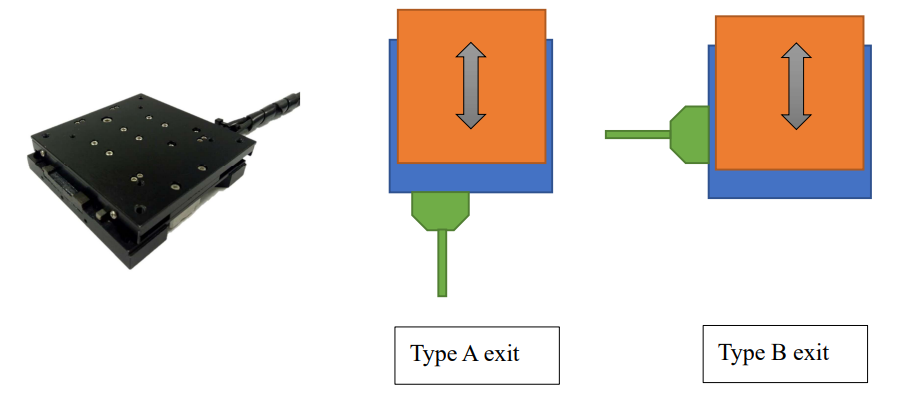
MTSA Single axis linear motion stage
-
- Zero cogging linear motor is employed to achieve zero backlash motion.
- Miniature linear ball bearing is adopted to eliminate the dust-prof and the creepy problem caused by conventional cross roller guide.
- The moderate attractive force of the linear motor can be used to preload the linear guide to achieve minimal stepping of 20 nm and the repeatability of ±0.1um.
- Miniature optical encoder and programable resolution interpolator is used to ease application.
- Compact stage design makes mounting holes compatible to conventional hand tuning micro stage.
-
Model designation:

-
Specification:
| Mechanical parameters | Units | MTSA060 | MTSA080 | MTSA120 |
| Total stroke | mm | 19 | 19 | 38 |
| Effective stroke | mm | 16 | 16 | 36 |
| Straightness | um | <1 | <1 | <1 |
| Flatness | um | <3 | <3 | <3 |
| Repeatability | um | ±0.1 | ±0.1 | ±0.1 |
| Accuracy* | um | <0.5 | <0.5 | <0.5 |
| Moving mass | g | 177 | 190 | 640 |
| Total mass | g | 275 | 377 | 1000 |
| Electrical parameters | Units | MTSA060 | MTSA080 | MTSA120 |
| Peak force | Nt | 8.1 | 16 | 30 |
| Conti. force | Nt | 2.7 | 4 | 10 |
| Peak current | A | 0.75 | 2 | 3 |
| Conti. current | A | 0.25 | 0.5 | 1 |
| Force constant | Nt/Apeak | 10.8 | 8.1 | 10.8 |
| Back EMF | Vpeak(per phase)/m/s | 3.6 | 2.7 | 3.6 |
| Resistance(line-to-line) | ohm | 33 | 11 | 8.2 |
| Inductance(line-to-line) | mH | 1.3 | 0.44 | 0.3 |
| Pole pair length | Mm | 9.6 | 9.6 | 9.6 |
| Motor voltage | V | 24 | 24 | 24 |
-
Pin definition:
-
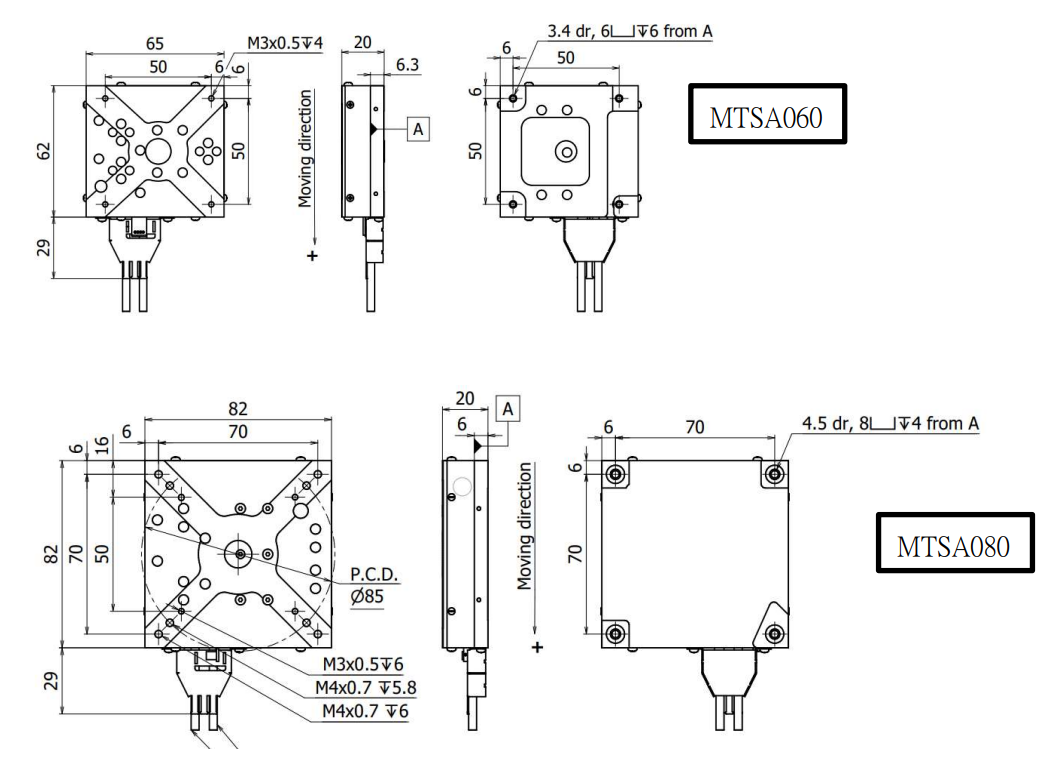
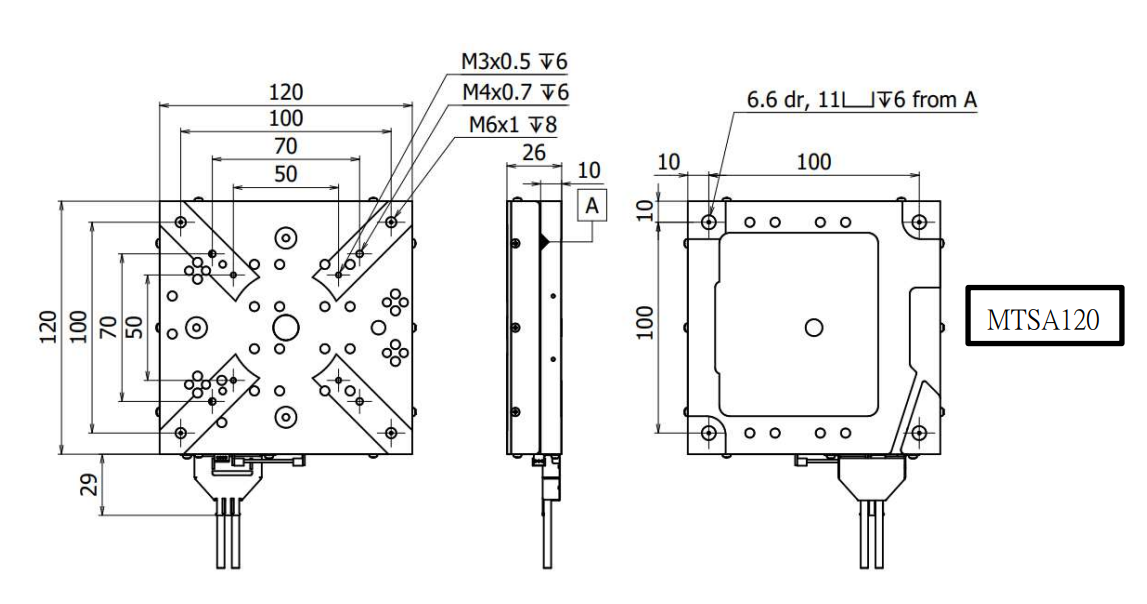
Dimension:
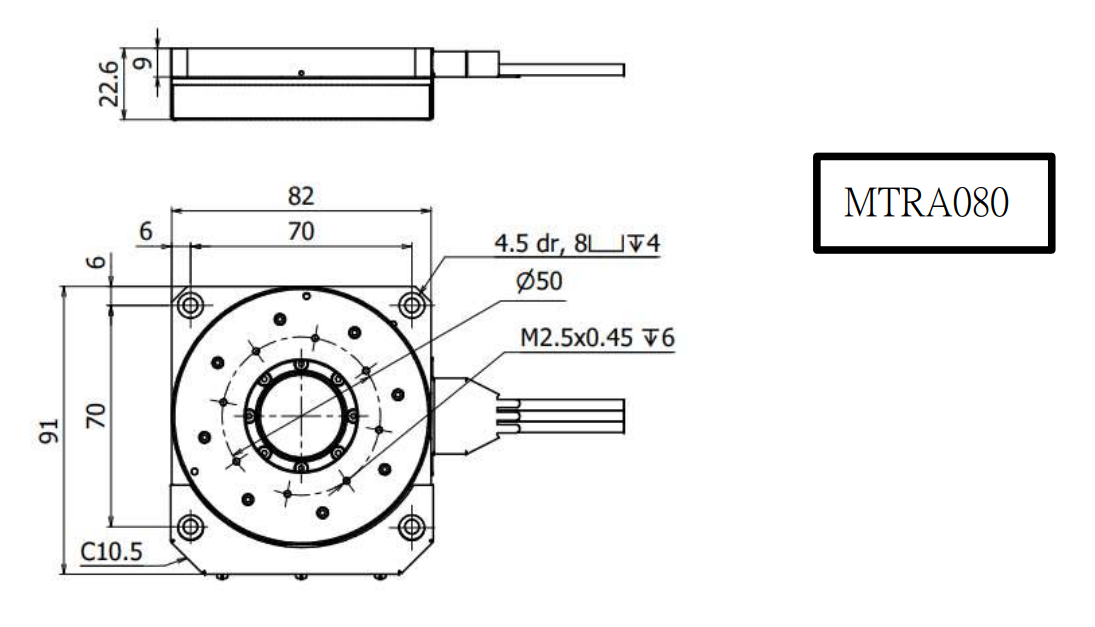
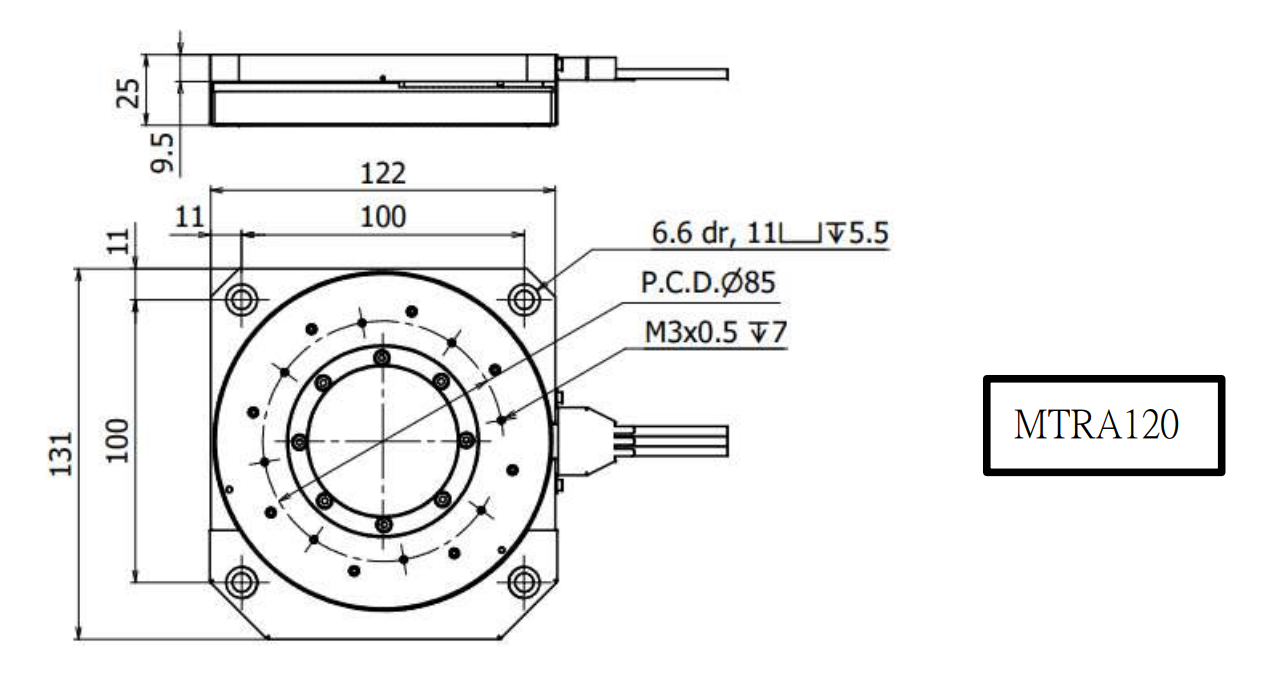
MTRA Rotational motion stage
- Zero cogging rotary motor is employed to achieve zero backlash motion.
- Slim design with special bearing to achieve high rigidity and excellent flatness.
- Finite rotation stroke with the maximal angle of 180 degree.
- Large center hole to ease optical path arrangement.
- Miniature optical encoder and programable resolution interpolator is used to ease application.

-
Model designation:

-
Specification:
| Mechnical parameters | Units | MTRA060 | MTRA080 | MTRA120 |
| Total stroke | degree | 100/190 | 100/190 | 100/190 |
| Effective stroke | degree | 90/180 | 90/180 | 90/180 |
| Resolution | arcsec | 0.13307 | 0.1006 | 0.0687 |
| Concentricity deviation | um | ±2 | ±2.5 | ±3.5 |
| Flatness deviation | um | ±3 | ±3.5 | ±4.5 |
| Repeatability | arcsec | ±0.3 | ±0.3 | ±0.3 |
| Accuracy | arcsec | <±2.5 | <±2 | <±2 |
| Rotor inertia | Kg-mm^2 | 49 | 181 | 850 |
| Total mass | g | 250 | 433 | 920 |
| Electrical parameters | Units | MTRA060 | MTRA080 | MTRA120 |
| Peak torque | Nt-m | 0.45 | 0.78 | 1.71 |
| Conti. torque | Nt | 0.15 | 0.26 | 0.57 |
| Peak current | A | 1.5 | 1.5 | 1.5 |
| Conti. current | A | 0.5 | 0.5 | 0.5 |
| Torque constant | Nt-m/Apeak | 0.3 | 0.52 | 10.8 |
| Back EMF | Vpeak(per phase)/rad/s | 0.1 | 2.7 | 3.6 |
| Resistance(line-to-line) | ohm | 7.1 | 9.4 | 14 |
| Inductance(line-to-line) | mH | 2.3 | 5.8 | 13 |
| Number of poles | 12 | 16 | 24 | |
| Motor voltage | V | 24 | 24 | 24 |
-
Pin definition:
-
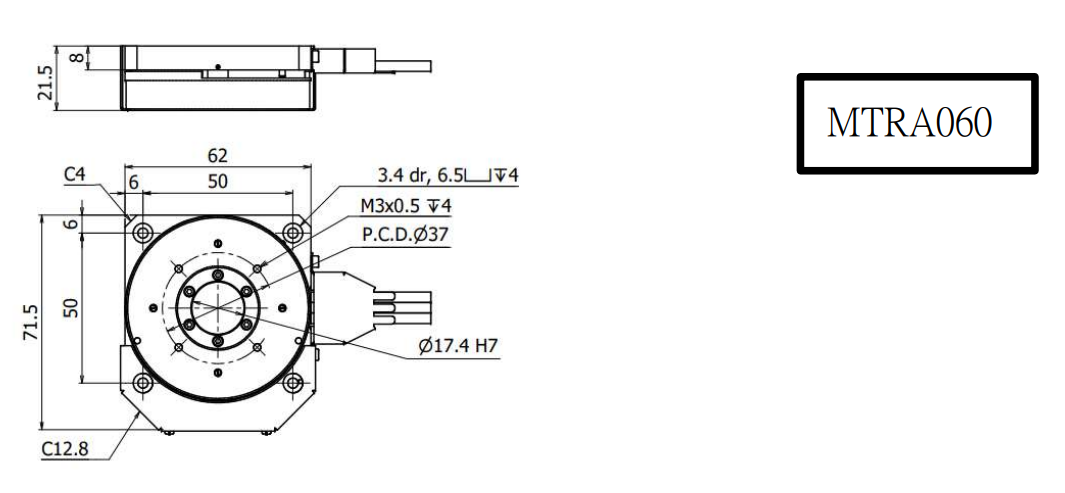
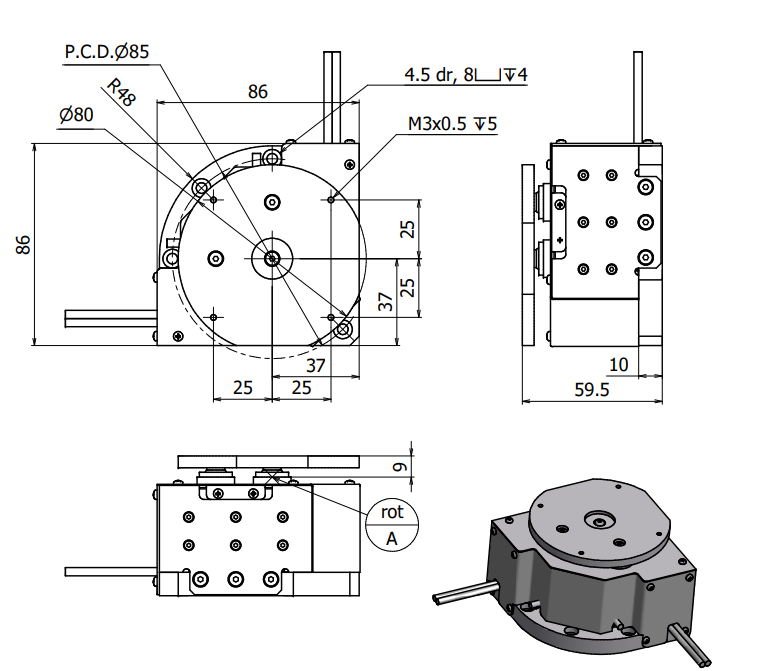
Dimension:
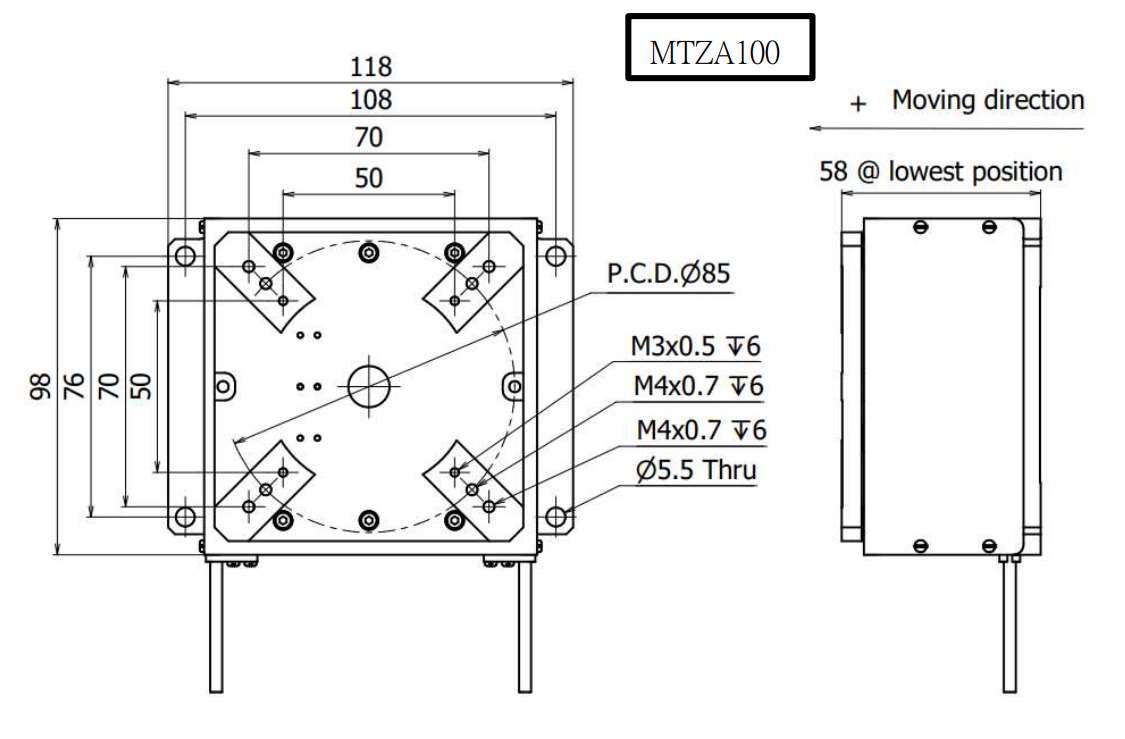
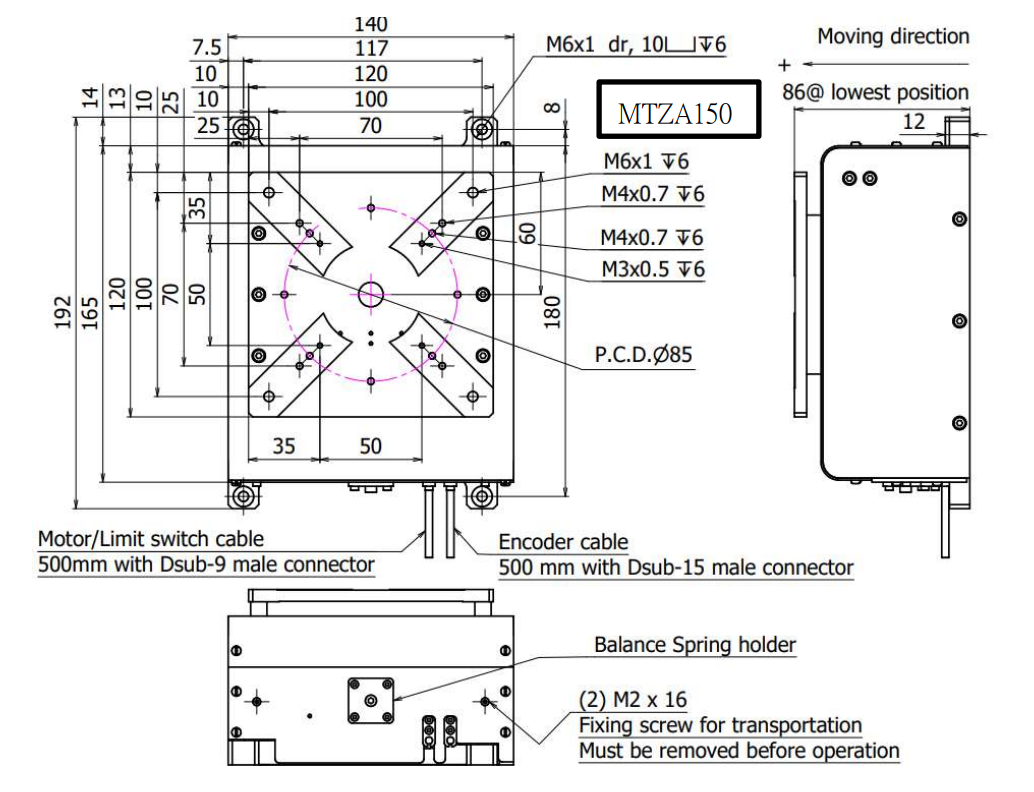
MTZA Wedge lift vertical motion stage
- Wedge structure is used to magnify the lift force so that the center of gravity of payload is not offset from the thrust axis.
- Zero cogging linear motor is employed to achieve zero backlash motion.
- The moderate attractive force of the linear motor can be used to preload the linear guide to achieve minimal stepping of 20 nm and the repeatability of ±0.1um.
- Miniature optical encoder and programable resolution interpolator is used to ease application.
- Usually used as the base stage to lift other axes above.

-
Model designation:

-
Specification:
| Mechanical parameters | Units | MTZA100 | MTZA150 |
| Total stroke | mm | 4 | 8 |
| Effective stroke | mm | 3 | 7 |
| Straightness | um | <1 | <1 |
| Flatness | um | <3 | <3 |
| Repeatability | um | ±0.1 | ±0.1 |
| Accuracy | um | <0.5 | <0.5 |
| Moving mass | g | 320 | 646 |
| Total mass | g | 958 | 2500 |
| Electrical parameters | Units | MTZA100 | MTZA150 |
| Peak force | Nt | 160 | 288 |
| Conti. force | Nt | 40 | 72 |
| Peak current | A | 4 | 8 |
| Conti. current | A | 1 | 2 |
| Force constant | Nt/Apeak | 40 | 33.7 |
| Back EMF | Vpeak(per phase)/m/s | 13.3 | 11.2 |
| Resistance(line-to-line) | ohm | 5.5 | 2.75 |
| Inductance(line-to-line) | mH | 0.22 | 0.11 |
| Pole pair pitch | mm | 1.6 | 1.6 |
| Motor voltage | V | 24 | 24 |
-
Pin definition:

-
Dimension:
MTPR Common pivot center pitch-roll motion stage
- Common pivot center structure is employed for both pitch and roll axes so that the calibration of motion center is simplified.
- Zero cogging linear motor is employed to achieve zero backlash motion.
- The effective pitch/roll angle is ±5 degree
- Miniature optical encoder and programable resolution interpolator is used to ease application.
-
Model designation:

-
Specification:
| Mechanical parameters | Units | MTPR080 |
| Pitch/Roll total stroke | degree | ±7 |
| Pitch/Roll effective stroke | degree | ±5 |
| Resolution | arcsec | 0.0987 |
| Repeatability | arcsec | ±0.3 |
| Accuracy | arcsec | <±2.5 |
| Rotor inertia | Kg-mm^2 | 26 |
| Total mass | g | 640 |
| Electrical parameters | Units | MTPR080 |
| Peak torque | Nt-m | 0.52 |
| Conti. torque | Nt | 0.13 |
| Peak current | A | 2 |
| Conti. current | A | 0.5 |
| Torque constant | Nt-m/Apeak | 0.26 |
| Back EMF | Vpeak(per phase)/rad/s | 0.08 |
| Resistance(line-to-line) | ohm | 33 |
| Inductance(line-to-line) | mH | 1.3 |
| Pole pair pitch | mm | 9.6 |
| Motor voltage | V | 24 |
-
Pin definition:
-
Dimension:
Download
[Back to top…]
| 資料名 | 檔案名 | 備註 |
| Catalog of miniature positioning stage of nano precision | Miniature Nano Precision 6 DOF Positioning Stage.pdf | |
| MTSA series assembly | MTSA.rar | 3D |
| MTRA series assembly | MTRA.rar | 3D |
| MTZA series assembly | MTZA.rar | 3D |
| MTPR080 assembly | MTPR080.rar | 3D |