")
在此,我們針對線性馬達工作原理、邊端效應作一解釋,再者,我們針對線性馬達平台與滾珠螺桿平台作一比較,進者,我們針對各型線性馬達之特長加以分析,最後,我們強調一些應用線性馬達所需之重要課題。
- 線性馬達之於旋轉馬達
- 示意圖:
- 示意圖:
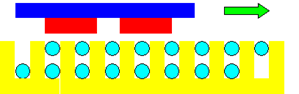
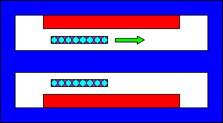
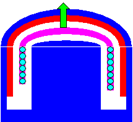
線性馬達工作原理相較於旋轉馬達可說是完全相同,如下圖所示,線性馬達可視為將旋轉馬達從表面切至軸中心然後攤平。
所以,任何種類之旋轉馬達總會有一個相對應工作原理之線性馬達,比方說,感應旋轉馬達之於線性感應馬達;直流無刷旋轉馬達之於線性直流無刷馬達。在此,我們不打算詳細介紹每一種馬達之工作原理,因為大部分之電機教科書中多所闡述,取而代之的,我們想要指出旋轉馬達與線性馬達最大之不同點 — 邊端效應,一個必須注意的副作用。
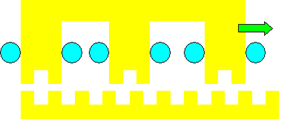
- 邊端效應:
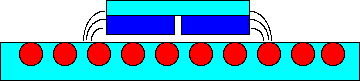
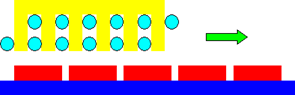
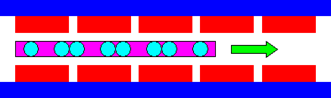
旋轉馬達與線性馬達最大之不同點就是邊端效應,如下圖您可發現,線性馬達沿著運動方向有兩個不連續的端點,而旋轉馬達並沒有。
如此之邊端將會產生一些複雜之現象,像是由於磁組變化所生之頓振轉矩、以及高速運行下之磁場畸變,因此,不管是線性馬達的設計或是驅動器的設計,必須考慮此副作用,特別是應用於快速高精度的定位場合。
- 線性馬達平台之於滾珠螺桿平台
- 下表列出線性馬達平台與滾珠螺桿平台之比較表.
線性馬達平台 | 滾珠螺桿平台 | |
優點 | 高速及高加減速實現容易 較少的維護需求 直接驅動使快速定位容易 較高的動態剛性與伺服頻寬 行程無限制 | 相同平台體積可得較大推力 規格化大量生產價格較低 |
缺點 | 相同平台體積推力較小 價格稍高 應用困難(?) | 速度及加減速限制較嚴 由於磨損必須經常維護校正以保持精度 背隙使得動態剛性差且精密定位較複雜 行程有限制 |
- 在此我們想說的是,即使線性馬達目前有較高的價格,因為尚未標準化量產,然而,考慮其優異之性能使您的機器升級,及免維護性以降低您的長期成本,採用線性馬達是非常值得且刻不容緩的。至於應用層面而言,我們認為高速、高精度、中等負載的應用場合是最適合不過了,像是取放機器設備。
- 線性馬達分類與特性
應用於精密伺服控制之線性馬達主要包含下列三種:
- 無刷交流伺服馬達 :
該馬達由兩部分組成,其一是由複數個磁鐵以交錯極性貼於背鐵之組合用以產生主要磁場,另一部分是由三相線圈固定於矽鋼片疊積(iron-core) 或由樹脂/環氧膠固定(epoxy-core)通以電流產生推力。任一部份皆可為動子,相對的另一部份為定子;如果磁石部為動子我們稱動磁石式”moving magnet”,相反的則為動線圈式”moving winding”。
Iron-core moving-winding
Iron-core moving magnet
Ironless/Epoxy-core
- 音圈馬達(VCM):
此種馬達早已運用於硬碟機之讀取頭,定子部是由磁石與背鐵所組成產生磁封閉迴路,而動子則由單一線圈組成通以直流電流,置放於氣隙中而產生推力,此種馬達主要有兩種外型:方塊式與圓筒式。
方塊式VCM
圓筒式 VCM
- 步進馬達:
其定子是由齒狀矽鋼片疊積所組成,動子是由多相線圈纏繞於齒狀之另一矽鋼片疊積而組成,由於槽齒配合之磁阻變化使得週期性的停點發生,而多相線圈可藉由激磁,使動子由一停點變換至另一停點而產生運動,當然如果電流能線性控制,更細的定位分割即可達到 (例如:微步進馬達)。
下表列出各組態馬達之特性比較。
優點 | 缺點 | 適合應用 | |
無刷馬達, iron-core type, moving magnet | 高推力密度 高推力/移動質量比 無移動電纜 | 有頓振推力 有推力漣波 | 高速及高加減速取放設備 |
無刷馬達, iron-core type, moving winding | 高推力密度 | 有頓振推力 有推力漣波 較低推力/移動質量比 有移動電纜 | 長行程定位應用 |
無刷馬達, coreless/epoxy-core | 無頓振推力 | 有推力漣波 低推力密度 低線圈電感 有移動電纜 | 高精度軌跡追蹤 |
音圈馬達 | 結構簡單控制容易低價 高推力/移動質量比 無頓振推力 無推力漣波 | 低推力密度 有移動電纜 行程較短 | 垂直應用場合 精密力量控制場合 解析度到奈米等級 |
步進馬達 | 不需回授光學尺,低價 驅動器簡單 | 氣隙非常小,加工平坦度要求高 定位精度由馬達加工條件決定且可能失步 長而且不可控的整定時間 推力隨速度增加劇減 | 中等精度及速度應用場合 |
- 優秀線性馬達系統之主要考量
- 頓振推力(Cogging force)
由於邊端效應及齒槽效應,無刷鐵心式線性馬達將具有頓振推力。此頓振推力必須降至額定推力之2%以下才可達成快速定位及低速穩定運轉。降低頓振推力之方法包括磁石斜槽,大的極槽公倍數,驅動器磁場諧波補整。因此一個好的線性馬達必須使頓振推力越小越好,在不通電的情況下,您可用手推動動子部,好的線性馬達應有平順之手感。
- 推力漣波(Force ripple)
此物理量與頓振推力不同,但表現的結果類似,此現象之生成乃因無刷馬達需換相(Commutation)控制,且磁石磁場並非標準正弦分佈,即使是無鐵心馬達亦有此現象,其將影響快速定位及低速穩定運轉。該項特性僅可由特殊設備測得,因此製造商必須擁有此測試設備以確立產品品質。
- 推力/移動質量比
推力/移動質量比決定了該線性馬達的負載能力。小的移動質量代表更高的額外負載能力,此外,高的移動質量在高加減速運動時,將對您的機器產生可觀之震動也可能導致不可預測的共振,因此,一個好的線性馬達必須使其移動質量愈小愈好。
- 解偶機構
在某些應用中,雙軸同時高加減速運動是基本的需求,大部分的運動模組,僅是將一軸直接疊在另一軸之上,這將導至兩軸之頻寬差異非常大,例如,將X軸疊在Y軸上,X軸的馬達只需負載其本身之移動質量,而Y軸必須負載除了本身的移動質量之外仍需負擔整個X軸平台的質量,這種組態稱為”疊積式XY平台。為了要使兩軸的頻寬相近,必須利用解偶機構將兩軸之移動質量隔離,如此,各軸之馬達僅需負擔本身之移動質量及共用滑台,這種組態稱為”解偶式XY平台”。
- Duty cycle
Duty cycle再決定線性馬達的額定出力時非常重要,在大多數的場合,線性馬達不可能全時間都在運動,其也許會停下來一段時間等待像是影像校正或其他軸的運動,我們須知線性馬達的大小和他的額定出力有關而與最大出力無關,所以我們必須非常小心的決定duty cycle或是motion profile,否則您的線性馬達將過大而佔空間增成本,或過小而造成馬達過熱燒毀。
- 移動電纜
除了導引用的線性滑軌,移動電纜是關乎線性馬達平台壽命的一個重要因素,好的線性馬達平台必須使它的移動電纜愈少愈好,如果行程不長的話,可採用”動磁石式”組態配合”固定式光學尺讀頭”,使移動電纜完全移除,這點針對高頻率的高加減速應用場合非常重要。
對規格定義清楚的了解是選擇適合的線性馬達定位平台最基礎的一環。因為如制定的規格太嚴將導致價格升高,太鬆會使整個設計失敗;因此,在設計之前,花些時間讀一讀此頁內容是非常值得的。
基本上有三部分的規格定義您必須了解,包括:平台規格定義、動態定位規格定義、與線性馬達規格定義。
- 平台規格定義
- 有效行程 Effective stroke
指可有效定位的行程,不含平台兩端用於極限開關之行程。 - 解析度 Resolution
指最小能達成之步級命令定位響應,對於設計調整良好的線性馬達而言,其解析度應等於回受光學尺的解析度,但實際上,這兩個解析度是不同的東西。比方說,配有1um解析度光學尺的平台,如設計調整不佳,下命令叫它走0.1um之步級,平台不一定會走,等到下到0.5um步級命令時,平台始可完成定位,此時平台解析度為0.5um,而不是0.1um。 - 外加負載 External payload
指外掛在滑台上工件的質量。 - 移動質量 Moving mass
指平台本身滑台之質量,不含外加負載,此規格由製造商提供。決定馬達推力時,必須考慮此項值。 - 定位精度、重現精度、及失步精度 Accuracy, Repeatability, and lost motion
這三個規格基本上屬平台的靜態規格,且與組成平台各零組件的加工組裝精度有關,例如,定位精度是由機構件加工精度、滑軌直平度、光學尺本身刻劃絕對精度,所綜合之效應。而重現精度則與光學尺解析度、滑軌預壓剛性、與機構件結構剛性有關,而失步精度對線性馬達而言應小於解析度,此因線性馬達為直接驅動無背隙。我們在此想強調的是,這三個規格越嚴,平台價格也越高。因此必須根據應用仔細決定這三個規格,期能以最低之成本剛好達成符合應用要求之精度規格設定。
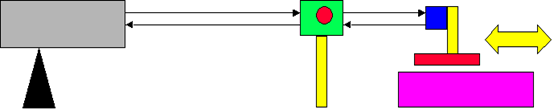
如下圖所示,這三個規格的量測基本上是使用雷射干涉儀。將定位平台固定於平面度精密之花崗桌上,下命令控制滑台在有效行程內來回m次,每次分別定位於n個點,記錄實際雷射讀值,與位置命令值。
- 有效行程 Effective stroke
行程內各點之定位精度、重現精度、與失步精度之數學式列於下圖。
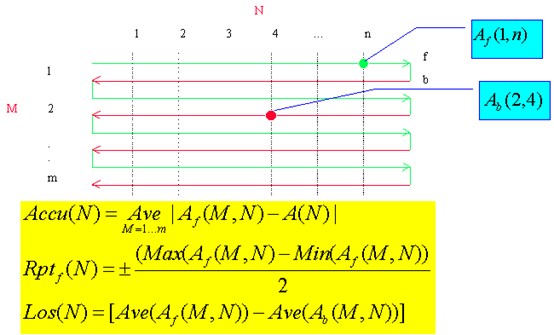
對於定位平台的使用者而言,重現精度是最重要的規格,因為它直接關係到您最終產品的品質,所以在價格允許範圍內應使重現精度愈小愈好。而定位精度規格之決定則多少有些技巧,因為定位平台的最後定位精度可藉由定位精度測試結果加以補正(error mapping),此外,對於配有影像系統的設備而言,定位精度的規格可寬鬆些以降低價格。
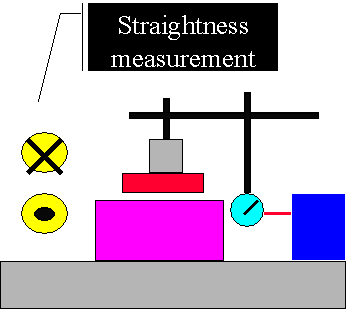
- 直平度 Straightness and Flatness
直度是指在某一行程內滑台行走時最大之左右飄移量,此規格可利用千分表沿一標準垂直平面移動測得,此外也可經由雷射干涉儀配合特殊鏡組量測而得。
平面度是指在某一行程內滑台行走時最大之上下飄移量,此規格可利用千分表沿一標準水平平面移動測得,此外也可經由雷射干涉儀配合特殊鏡組量測而得。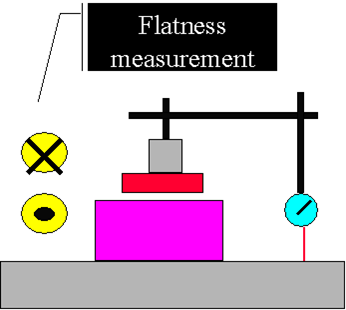
- 動態定位規格定義
- 最大速度、最大加速度 Maximal velocity, maximal acceleration
這兩個規格是根據整個運動路徑剖面導出,我們想在此強調的是,在特定時間內完成特定行程距離定位之運動路徑剖面有無限多種組合,如下圖所示。此外最高速度之限制除馬達本身反電動勢限制之外,滑軌及光學尺之最高速度限制也應注意,而越大的加速度代表需要更大的馬達與驅動器功率。因此如何決定運動路徑剖面使這兩個規格值取得平衡是非常重要的。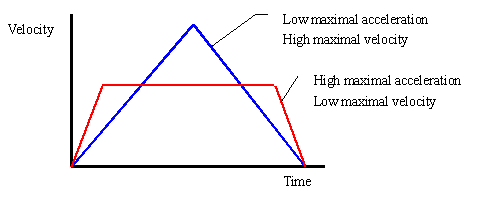
- 最大速度、最大加速度 Maximal velocity, maximal acceleration
- 完成定位規格 In-position specification
此規格定義完成某一行程定位在某個誤差範圍內所需之時間,例如晶片焊線機必須在18ms內完成2mm行程,並定位在 +/- 3um 之誤差範圍內,當平台製造商保證此規格時,出貨前必須以假負載質量佩掛下,進行驅動器調整以驗證此規格。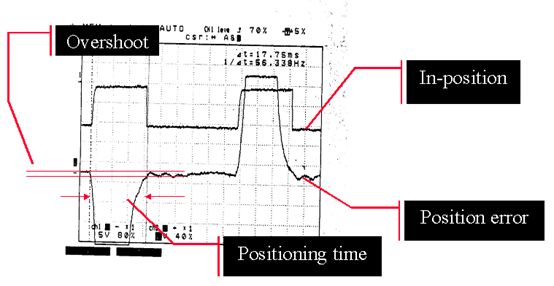
- 線性馬達規格定義
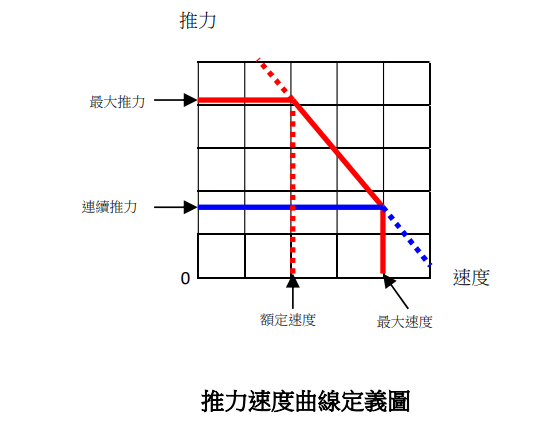
- 額定推力 Rated thrust
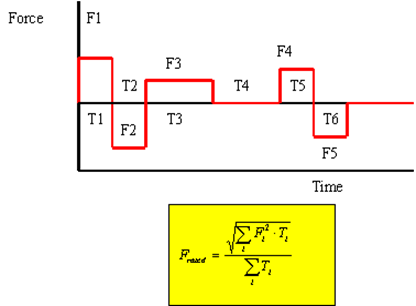
此規格也被稱為”連續推力”, 意指馬達連續產生此推力而使線圈溫升在某一溫度以下不造成馬達過熱燒毀。此值是根據運動路徑剖面導出,以下是其計算方式。
- 額定推力 Rated thrust
- 最大推力 Maximal thrust
此規格定義在本身滑台移動質量佩掛外加負載的情況下,達成最大加速度需求所需之馬達推力,此規格較嚴謹之定義應包含馬達執行最大推力可允許的時間。 - 額定電流 Rated current
指產生額定推力時流過馬達線圈之m.s. 線電流。 - 最大電流 Maximal current
指產生最大推力時流過馬達線圈之m.s. 線電流。 - 推力常數 Force constant
指每安培m.s. 線電流所產生之推力。 - 電壓常數 Voltage constant (Back emf)
指馬達在1 m/sec運動下於馬達線端所生之峰值電壓。 - 線圈電阻 Coil resistance
於馬達兩線間所量得之電阻值。 - 線圈電感 Coil inductance
於馬達兩線間所量得之電感值。
規格定義清楚的了解之後,針對特定應用如何選擇適當的電機是最重要的一環,我們將用一個實際的例子,來推演如何進行電機選型。
- 應用輸入
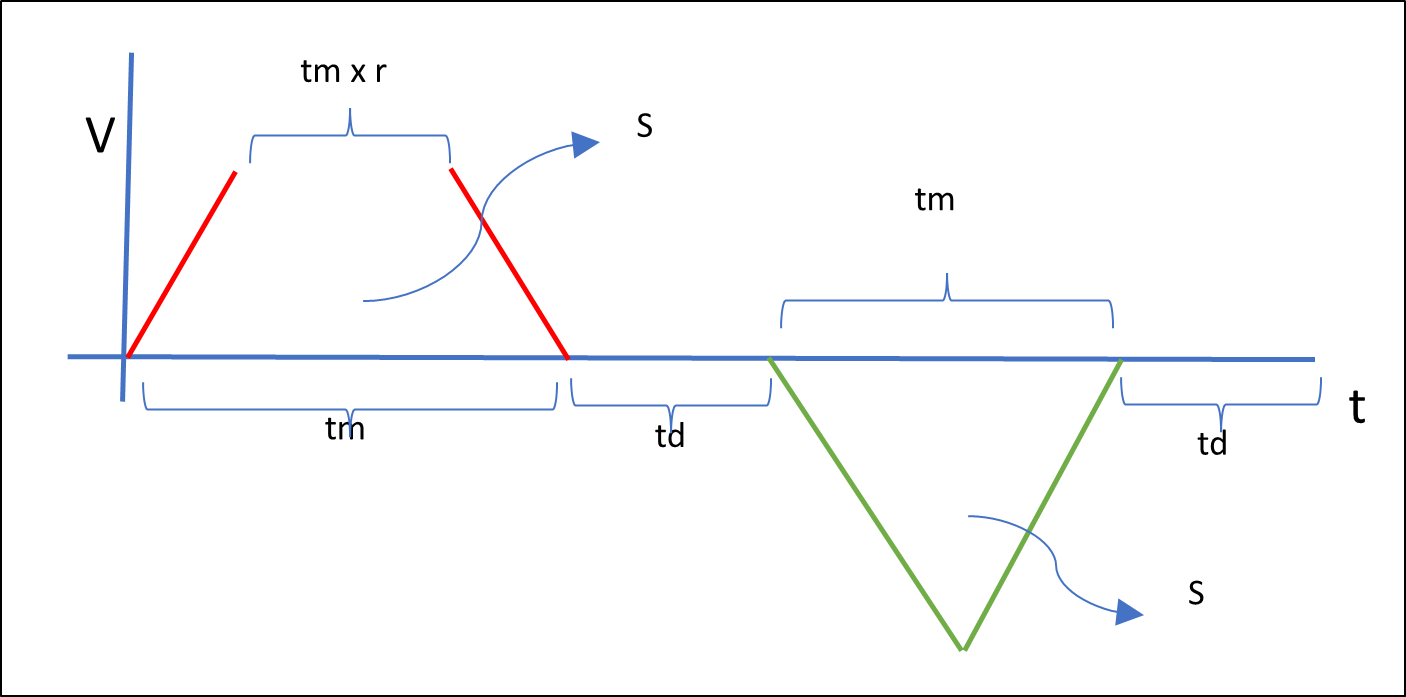
每一台設備電機的選型都是由生產節拍圖或運動波形圖所決定,任何一段移動都包括下列4個參數,如下圖,縱軸是速度,橫軸是時間,紅色線(梯形曲線)為A移到B點花了tm秒,其中 tm x r 秒維持等速,休息td秒,再由綠色線(三角曲線)B點返回A點,但以不同的速度曲線返回,其中r=0 ,也就是沒有等速段,這兩個曲線所圍繞的面積都是A到B的距離S,周而復始。
移動行程: S (m)
走完行程所需時間 : tm (sec)
等速段佔走行時間比 : r
完成後休息時間: td (sec)
移動質量:M (kg)
- 計算輸出
當給出上述參數,我們要得到下列數據輸出,用以決定電機的性能。
紅色梯形曲線
最大加速度 : a1_max = 4*S/(tm^2*(1-r^2))
最大速度: V1max = a1_max*tm*(1-r)/2
確認在最大速度V1max下,要有最大推力: F1max = M*a1_max
綠色三角曲線
最大加速度 : a2_max = 4*S/(tm^2)
最大速度: V2max = a2_max*tm/2
確認在最大速度V2max下,要有最大推力: F2max = M * a2_max
連續推力計算
Fconti = M*sqrt{(a1_max^2*tm*(1-r)+a2_max^2*tm)/(2*tm+2*td)}
此時最大推力
Fmax= max(F1max, F2max)
選出合適的馬達型號並找出該電機的推力速度圖
確認(V1max, F1max)及(V2max, F2max)是否在紅色實線包圍的範圍內,如否,要選擇大一號的電機,直到這兩點落入紅色實線包圍的範圍內。